This file defines methods that can be used to generate seed values for iterative numerical solvers used by Moveit for a generic robot. More...
#include <moveit/robot_state/robot_state.h>
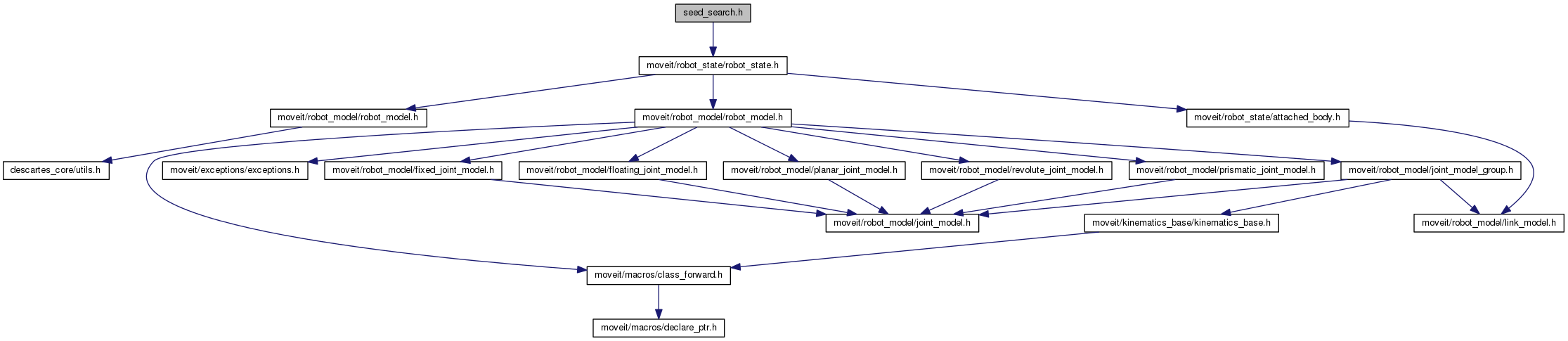
Include dependency graph for seed_search.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | descartes_moveit |
| namespace | descartes_moveit::seed |
Functions | |
| std::vector< std::vector < double > > | descartes_moveit::seed::findIndustrialSixDOFSeeds (moveit::core::RobotState &state, const std::string &group_name, const std::string &tool_frame) |
| findIndustrialSixDOFSeeds() is a specialization of findSeedStatesByPairs() that searches for seed states over joints 2,3 and 4,6 (1 indexed). These joints often form elbow and wrist configurations. | |
| std::vector< std::vector < double > > | descartes_moveit::seed::findRandomSeeds (moveit::core::RobotState &state, const std::string &group_name, unsigned n) |
| Uses moveit's underlying random function to find n random joint configurations that satisfy model bounds. | |
| std::vector< std::vector < double > > | descartes_moveit::seed::findSeedStatesByPairs (moveit::core::RobotState &state, const std::string &group_name, const std::string &tool_frame, const std::vector< std::pair< unsigned, unsigned > > &pairs) |
| Returns a sequence of seed states for iterative inverse kinematic solvers to use when 'sampling' the solution space of a pose. These seeds are generated by iterating through all possible joint permutations of each pair of joints passed in by the user. | |
Detailed Description
This file defines methods that can be used to generate seed values for iterative numerical solvers used by Moveit for a generic robot.
- Date:
- April 2015
Users can call the findSeedStates() function with a robot state object, a particular Moveit move group, and a series of joint pairs. These joint pairs should define arm configurations such as elbow up or elbow down. For many 6 DOF robots, joints 2 & 3 and joints 4 & 6 (starting counting at 1) will form elbow and wrist configurations.
Definition in file seed_search.h.