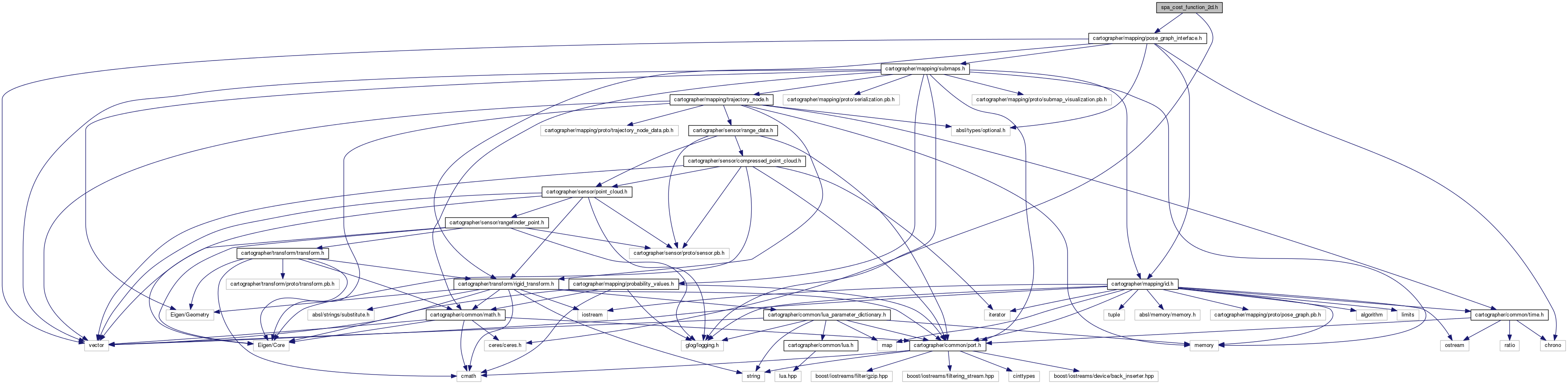
Include dependency graph for spa_cost_function_2d.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | cartographer |
| namespace | cartographer::mapping |
| namespace | cartographer::mapping::optimization |
Functions | |
| ceres::CostFunction * | cartographer::mapping::optimization::CreateAnalyticalSpaCostFunction (const PoseGraphInterface::Constraint::Pose &observed_relative_pose) |
| ceres::CostFunction * | cartographer::mapping::optimization::CreateAutoDiffSpaCostFunction (const PoseGraphInterface::Constraint::Pose &observed_relative_pose) |