#include "cartographer/cloud/proto/map_builder_service.pb.h"#include "cartographer/mapping/local_slam_result_data.h"#include "cartographer/mapping/trajectory_builder_interface.h"#include "cartographer/sensor/fixed_frame_pose_data.h"#include "cartographer/sensor/imu_data.h"#include "cartographer/sensor/landmark_data.h"#include "cartographer/sensor/odometry_data.h"#include "cartographer/sensor/timed_point_cloud_data.h"
Include dependency graph for sensor/serialization.h:
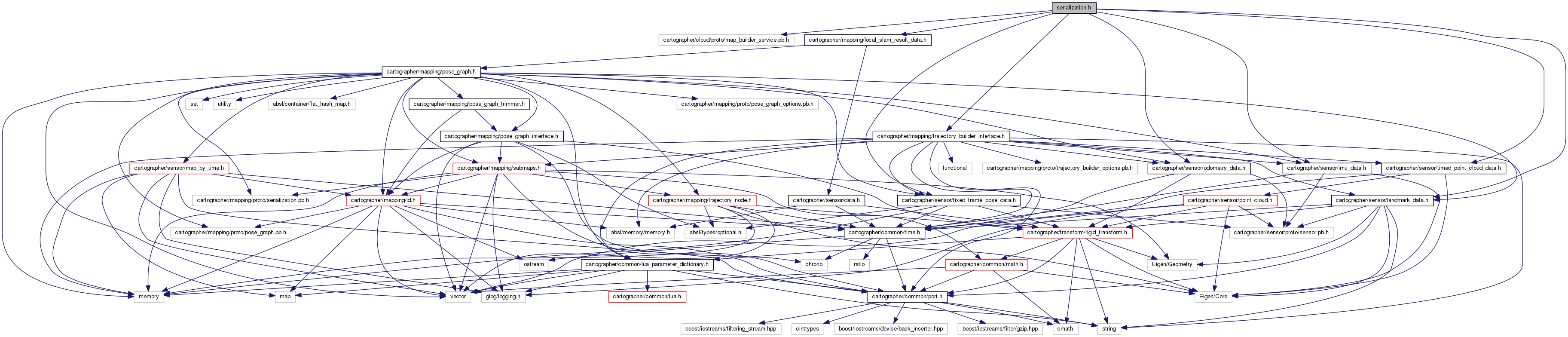
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | cartographer |
| namespace | cartographer::cloud |
Functions | |
| void | cartographer::cloud::CreateAddFixedFramePoseDataRequest (const std::string &sensor_id, int trajectory_id, const std::string &client_id, const sensor::proto::FixedFramePoseData &fixed_frame_pose_data, proto::AddFixedFramePoseDataRequest *proto) |
| void | cartographer::cloud::CreateAddImuDataRequest (const std::string &sensor_id, const int trajectory_id, const std::string &client_id, const sensor::proto::ImuData &imu_data, proto::AddImuDataRequest *proto) |
| void | cartographer::cloud::CreateAddLandmarkDataRequest (const std::string &sensor_id, int trajectory_id, const std::string &client_id, const sensor::proto::LandmarkData &landmark_data, proto::AddLandmarkDataRequest *proto) |
| void | cartographer::cloud::CreateAddOdometryDataRequest (const std::string &sensor_id, int trajectory_id, const std::string &client_id, const sensor::proto::OdometryData &odometry_data, proto::AddOdometryDataRequest *proto) |
| void | cartographer::cloud::CreateAddRangeFinderDataRequest (const std::string &sensor_id, int trajectory_id, const std::string &client_id, const sensor::proto::TimedPointCloudData &timed_point_cloud_data, proto::AddRangefinderDataRequest *proto) |
| void | cartographer::cloud::CreateSensorDataForLocalSlamResult (const std::string &sensor_id, int trajectory_id, const std::string &client_id, common::Time time, int starting_submap_index, const mapping::TrajectoryBuilderInterface::InsertionResult &insertion_result, proto::SensorData *proto) |
| void | cartographer::cloud::CreateSensorMetadata (const std::string &sensor_id, const int trajectory_id, const std::string &client_id, proto::SensorMetadata *proto) |
| mapping::TrajectoryBuilderInterface::SensorId | cartographer::cloud::FromProto (const proto::SensorId &proto) |
| proto::SensorId | cartographer::cloud::ToProto (const mapping::TrajectoryBuilderInterface::SensorId &sensor_id) |