Public Member Functions | |
| List< Object > | getBusInfo (String callerId) |
| List< Object > | getBusStats (String callerId) |
| List< Object > | getMasterUri (String callerId) |
| List< Object > | getPid (String callerId) |
| List< Object > | getPublications (String callerId) |
| List< Object > | getSubscriptions (String callerId) |
| List< Object > | paramUpdate (String callerId, String key, boolean value) |
| List< Object > | paramUpdate (String callerId, String key, char value) |
| List< Object > | paramUpdate (String callerId, String key, byte value) |
| List< Object > | paramUpdate (String callerId, String key, short value) |
| List< Object > | paramUpdate (String callerId, String key, int value) |
| List< Object > | paramUpdate (String callerId, String key, double value) |
| List< Object > | paramUpdate (String callerId, String key, String value) |
| List< Object > | paramUpdate (String callerId, String key, List<?> value) |
| List< Object > | paramUpdate (String callerId, String key, Vector<?> value) |
| List< Object > | paramUpdate (String callerId, String key, Map<?,?> value) |
| List< Object > | publisherUpdate (String callerId, String topic, Object[] publishers) |
| List< Object > | requestTopic (String callerId, String topic, Object[] protocols) |
| List< Object > | shutdown (String callerId, String message) |
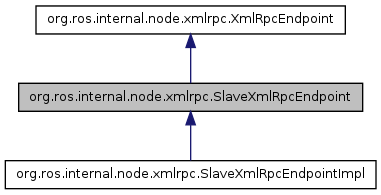
Detailed Description
Definition at line 26 of file SlaveXmlRpcEndpoint.java.
Member Function Documentation
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.getBusInfo | ( | String | callerId | ) |
Retrieve transport/topic connection information.
- Parameters:
-
callerId ROS caller ID.
- Returns:
- busInfo in the form of:
[[connectionId1, destinationId1, direction1, transport1, topic1, connected1]... ]
connectionId is defined by the node and is opaque. destinationId is the XMLRPC URI of the destination.
direction is one of 'i', 'o', or 'b' (in, out, both).
transport is the transport type (e.g. 'TCPROS'). topic is the topic name.
connected1 indicates connection status. Note that this field is only provided by slaves written in Python at the moment (cf. rospy/masterslave.py in _TopicImpl.get_stats_info() vs. roscpp/publication.cpp in Publication::getInfo()).
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.getBusStats | ( | String | callerId | ) |
Retrieve transport/topic statistics.
- Parameters:
-
callerId ROS caller ID.
- Returns:
- stats in the form of
[publishStats, subscribeStats, serviceStats]
where
publishStats: [[topicName, messageDataSent, pubConnectionData]...]
subscribeStats: [[topicName, subConnectionData]...]
serviceStats: (proposed) [numRequests, bytesReceived, bytesSent]
pubConnectionData: [connectionId, bytesSent, numSent, connected]
subConnectionData: [connectionId, bytesReceived, dropEstimate, connected]
dropEstimate: -1 if no estimate.
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.getMasterUri | ( | String | callerId | ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.getPid | ( | String | callerId | ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.getPublications | ( | String | callerId | ) |
Retrieve a list of topics that this node publishes.
- Parameters:
-
callerId ROS caller ID.
- Returns:
- topicList is a list of topics published by this node and is of the form [ [topic1, topicType1]...[topicN, topicTypeN]]]
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.getSubscriptions | ( | String | callerId | ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| boolean | value | ||
| ) |
Callback from master with updated value of subscribed parameter.
- Parameters:
-
callerId ROS caller ID. key parameter name, globally resolved value new parameter value
- Returns:
- ignore
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| char | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| byte | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| short | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| int | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| double | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| String | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| List<?> | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| Vector<?> | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.paramUpdate | ( | String | callerId, |
| String | key, | ||
| Map<?,?> | value | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.publisherUpdate | ( | String | callerId, |
| String | topic, | ||
| Object[] | publishers | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.requestTopic | ( | String | callerId, |
| String | topic, | ||
| Object[] | protocols | ||
| ) |
Publisher node API method called by a subscriber node. This requests that source allocate a channel for communication. Subscriber provides a list of desired protocols for communication. Publisher returns the selected protocol along with any additional params required for establishing connection. For example, for a TCP/IP-based connection, the source node may return a port number of TCP/IP server.
- Parameters:
-
callerId ROS caller ID topic topic name protocols list of desired protocols for communication in order of preference
- Returns:
- protocolParams or empty list if there are no compatible protocols
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
| List<Object> org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpoint.shutdown | ( | String | callerId, |
| String | message | ||
| ) |
Implemented in org.ros.internal.node.xmlrpc.SlaveXmlRpcEndpointImpl.
The documentation for this interface was generated from the following file: