Calculate optimal switching time¶
Now let us calculate the optimal time to switch between the energy shaping swing-up controller and the linear feedback stabilizing controller. In order to determine this time, tools from optimal control are employed; however, the details of why these tools work is not explained here. The point is to show how trep facilitates the implementation because it has already precomputed all the necessary derivatives.
Create pendulum system¶
The code used to create the pendulum system and the controllers is identical to the previous sections, except a new variable has been added that designates the switching time. This is initially set to an initial guess equal to one-half the final time. We will then use this initial guess to find the optimal switching time. This variable is tau is highlighted in the code below.
import math
from math import pi
import numpy as np
from numpy import dot
import trep
import trep.discopt
from trep import tx, ty, tz, rx, ry, rz
import pylab
# Build a pendulum system
m = 1.0 # Mass of pendulum
l = 1.0 # Length of pendulum
q0 = 0. # Initial configuration of pendulum
t0 = 0.0 # Initial time
tf = 10.0 # Final time
dt = 0.01 # Sampling time
qBar = pi # Desired configuration
Qi = np.eye(2) # Cost weights for states
Ri = np.eye(1) # Cost weights for inputs
uMax = 5.0 # Max absolute input value
tau = 5.0 # Switching time
system = trep.System() # Initialize system
frames = [
rx('theta', name="pendulumShoulder"), [
tz(-l, name="pendulumArm", mass=m)]]
system.import_frames(frames) # Add frames
# Add forces to the system
trep.potentials.Gravity(system, (0, 0, -9.8)) # Add gravity
trep.forces.Damping(system, 1.0) # Add damping
trep.forces.ConfigForce(system, 'theta', 'theta-torque') # Add input
# Create and initialize the variational integrator
mvi = trep.MidpointVI(system)
mvi.initialize_from_configs(t0, np.array([q0]), t0+dt, np.array([q0]))
# Create discrete system
TVec = np.arange(t0, tf+dt, dt) # Initialize discrete time vector
dsys = trep.discopt.DSystem(mvi, TVec) # Initialize discrete system
xBar = dsys.build_state(qBar) # Create desired state configuration
# Design linear feedback controller
Qd = np.zeros((len(TVec), dsys.system.nQ)) # Initialize desired configuration trajectory
thetaIndex = dsys.system.get_config('theta').index # Find index of theta config variable
for i,t in enumerate(TVec):
Qd[i, thetaIndex] = qBar # Set desired configuration trajectory
(Xd, Ud) = dsys.build_trajectory(Qd) # Set desired state and input trajectory
Qk = lambda k: Qi # Create lambda function for state cost weights
Rk = lambda k: Ri # Create lambda function for input cost weights
KVec = dsys.calc_feedback_controller(Xd, Ud, Qk, Rk) # Solve for linear feedback controller gain
KStabilize = KVec[0] # Use only use first value to approximate infinite-horizon optimal controller gain
# Design energy shaping swing-up controller
system.get_config('theta').q = qBar
eBar = system.total_energy()
KEnergy = 1
Create cost¶
In order to perform an optimization anything there must be some sort of cost functional that is desirable to minimize. Trep has built in objects to deal with cost functions and that is what is used here.
cost = trep.discopt.DCost(Xd, Ud, Qi, Ri)
The cost object is created with the trep.discopt.DCost method, which takes in a state trajectory, input trajectory, state weighting matrix, and input weighting matrix.
In this case we used the same trajectories and weights that were used for the design of the linear feedback controller that stabilizes the pendulum to the upright unstable equilibrium.
Below is a list of the properties and methods of the cost class.
>>> cost.
cost.Q cost.R cost.l_du cost.l_dx cost.l_dxdx cost.m_dx cost.ud
cost.Qf cost.l cost.l_dudu cost.l_dxdu cost.m cost.m_dxdx cost.xd
Please refer to the Discrete Trajectory Cost documentation to learn more this object.
Angle utility functions¶
Since we would like the stabilizing controller to stabilize to any multiple of \(\pi\), two helper functions are used to wrap the angles to between \(0\) and \(2\pi\) and between \(-\pi\) and \(\pi\).
def wrapTo2Pi(ang):
return ang % (2*pi)
def wrapToPi(ang):
return (ang + pi) % (2*pi) - pi
Simulate function¶
The simulation of the system is done exactly the same way as in previous sections, except this time the forward simulation is wrapped into its own function. This makes running the optimization simpler because the simulate function can be called with different switching times instead of having to have multiple copies of the same code.
def simulateForward(tau, dsys, q0, xBar):
mvi = dsys.varint
tf = dsys.time[-1]
# Reset discrete system state
dsys.set(np.array([q0, 0.]), np.array([0.]), 0)
# Initial conditions
k = dsys.k
t = dsys.time[k]
q = mvi.q1
x = dsys.xk
fdx = dsys.fdx()
xTilde = np.array([wrapToPi(x[0] - xBar[0]), x[1]])
e = system.total_energy() # Get current energy of the system
eTilde = e - eBar # Get difference between desired energy and current energy
# Initial list variables
K = [k] # List to hold discrete update count
T = [t] # List to hold time values
Q = [q] # List to hold configuration values
X = [x] # List to hold state values
Fdx = [fdx] # List to hold partial to x
E = [e] # List to hold energy values
U = [] # List to hold input values
L = [] # List to hold cost values
# Simulate the system forward
while mvi.t1 < tf-dt:
if mvi.t1 < tau:
if x[1] == 0:
u = np.array([uMax]) # Kick if necessary
else:
u = np.array([-x[1]*KEnergy*eTilde]) # Swing-up controller
else:
u = -dot(KStabilize, xTilde) # Stabilizing controller
u = min(np.array([uMax]), max(np.array([-uMax]), u)) # Constrain input
dsys.step(u) # Step the system forward by one time step
# Update variables
k = dsys.k
t = TVec[k]
q = mvi.q1
x = dsys.xk
fdx = dsys.fdx()
xTilde = np.array([wrapToPi(x[0] - xBar[0]), x[1]])
e = system.total_energy()
eTilde = e - eBar
l = cost.l(np.array([wrapTo2Pi(x[0]), x[1]]), u, k)
# Append to lists
K.append(k)
T.append(t)
Q.append(q)
X.append(x)
Fdx.append(fdx)
E.append(e)
U.append(u)
L.append(l)
J = np.sum(L)
return (K, T, Q, X, Fdx, E, U, L, J)
The choice of which controller to use within the simulation function is decided based on if the simulation time is less than the switching time (highlighted above). If the simulation time is less than tau then the swing-up controller is used, otherwise the linear stabilizing controller is used. Also note that we store and return a vector of the derivatives of the dynamics with respect to the state (highlighted above) i.e. trep.discopt.DSystem.fdx.
Optimize¶
The optimization of the switching time is done in the standard way of using a gradient decent method to minimize a cost function with respect to the switching time. Both a descent direction and a step size must be calculated. The negative gradient of the cost to the switching time is used for the descent direction. Therefore, the switching time is updated with the following
where \(\tau\) is the switching time, \(\gamma\) is the step size, and \(J\) is the cost function.
To calculate the negative gradient in each iteration of the optimization, first the system is simulated forward from the initial time to the final time. Then the costate of the system is simulated backward from the final time to the switching time. The gradient at the switching time is the inner product of the difference between the two control laws and the costate.
Trep greatly simplifies this calculation because it has already calculated the necessary derivatives. In the simulation function the derivative of the system with respect to \(x\) (highlighted above) is stored at each time instance. Also, the derivative of the cost with respect to \(x\) has been already calculated with trep. Both of these derivatives are used in the backward simulation of the costate (highlighted below).
An Armijo line search is used to calculate the step size in each iteration of the optimization.
cnt = 0
Tau = []
JVec = []
JdTau = float('Inf')
while cnt < 10 and abs(JdTau) > .001:
cnt = cnt + 1
# Simulate forward from 0 to tf
(K, T, Q, X, Fdx, E, U, L, J) = simulateForward(tau, dsys, q0, xBar)
# Simulate backward from tf to tau
k = K[-1]
lam = np.array([[0],[0]])
while T[k] > tau + dt/2:
lamDx = np.array([cost.l_dx(X[k], U[k-1], k)])
f2Dx = Fdx[k]
lamDt = -lamDx.T - dot(f2Dx.T,lam)
lam = lam - lamDt*dt
k = k - 1
# Calculate dynamics of swing-up controller at switching time
x = X[k]
xTilde = np.array([wrapToPi(x[0] - xBar[0]), x[1]])
u1 = -dot(KStabilize, xTilde)
u1 = min(np.array([uMax]), max(np.array([-uMax]), u1))
dsys.set(X[k], u1, k)
f1 = dsys.f()
# Calculate dynamics of stabilizing controller at switching time
eTilde = E[k] - eBar
u2 = np.array([-x[1]*KEnergy*eTilde])
u2 = min(np.array([uMax]), max(np.array([-uMax]), u2))
dsys.set(X[k], u2, k)
f2 = dsys.f()
# Calculate value of change in cost to change in switch time
JdTau = dot(f1-f2, lam)
# Armijo - used to determine step size
chi = 0
alpha = .5
beta = .1
tauTemp = tau - (alpha**chi)*JdTau
(KTemp, TTemp, QTemp, XTemp, FdxTemp, ETemp, UTemp, LTemp, JTemp) = simulateForward(tauTemp, dsys, q0, xBar)
while JTemp > J + (alpha**chi)*beta*(JdTau**2):
tauTemp = tau - (alpha**chi)*JdTau
(KTemp, TTemp, QTemp, XTemp, FdxTemp, ETemp, UTemp, LTemp, JTemp) = simulateForward(tauTemp, dsys, q0, xBar)
chi = chi + 1
gamma = alpha**chi # Step size
# Calculate new switching time
tauPlus = tau - gamma*JdTau
# Print iteration results
print "Optimization iteration: %d" % cnt
print "Current switch time: %.2f" % tau
print "New switch time: %.2f" % tauPlus
print "Current cost: %.2f" % J
print "Parital of cost to switch time: %.2f" % JdTau
print ""
# Update to new switching time
tau = tauPlus
print "Optimal switch time: %.2f" % tau
The results of each iteration are then printed to the screen. The optimization stops when the gradient is smaller than 0.001 or the number iteration is 10 or more. Once the optimization completes the optimal switching time is printed to the screen.
Simulate with optimal switching time¶
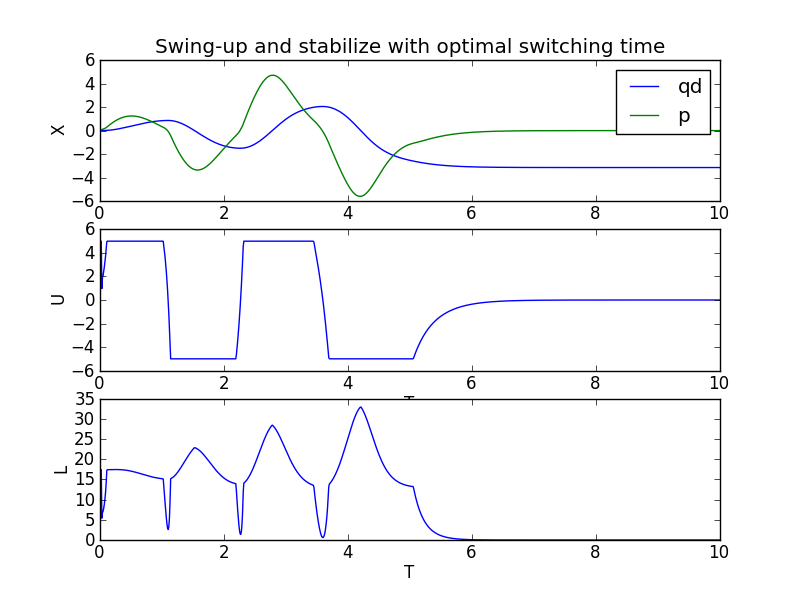
Once the optimal switching time is calculated the system can be simulated forward from its initial configuration. It will reach its desired configuration given the constrained input by switching between the two controllers. In addition, this switch is performed at the optimal time.
(K, T, Q, X, Fdx, E, U, L, J) = simulateForward(tau, dsys, q0, xBar)
From the output of the simulation you can see that it take 3 iteration to converge to the optimal switching time of 4.63.
>>> %run optimalSwitchingTime.py
Optimization iteration: 1
Current switch time: 5.00
New switch time: 4.79
Current cost: 9680.81
Parital of cost to switch time: 1.70
---
Optimization iteration: 2
Current switch time: 4.79
New switch time: 4.63
Current cost: 9214.82
Parital of cost to switch time: 0.62
---
Optimization iteration: 3
Current switch time: 4.63
New switch time: 4.63
Current cost: 9204.84
Parital of cost to switch time: 0.00
---
Optimal switch time: 4.63
Visualize the system in action¶
The visualization is created just as in previous sections.
trep.visual.visualize_3d([ trep.visual.VisualItem3D(system, T, Q) ])
# Plot results
ax1 = pylab.subplot(311)
pylab.plot(T, X)
pylab.title("Swing-up and stabilize with optimal switching time")
pylab.ylabel("X")
pylab.legend(["qd","p"])
pylab.subplot(312, sharex=ax1)
pylab.plot(T[1:], U)
pylab.xlabel("T")
pylab.ylabel("U")
pylab.subplot(313, sharex=ax1)
pylab.plot(T[1:], L)
pylab.xlabel("T")
pylab.ylabel("L")
pylab.show()
Let’s also plot the state, input, and cost verse time.
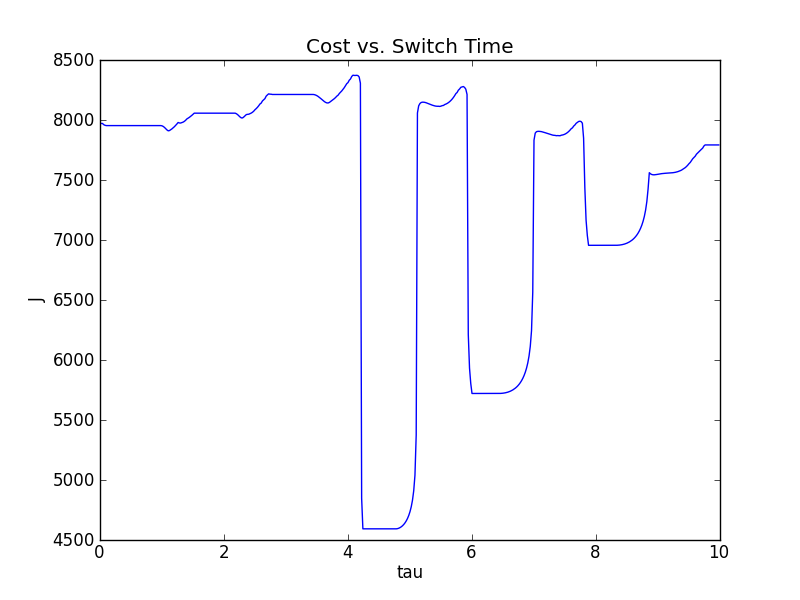
Just for reference the cost verse switching time is shown for all switching times from time zero to the final time. You can see that the optimization does find a switching time with a local minimum in the cost. Clearly, this cost verse switching time is non-convex, thus our gradient descent method only finds a local minimizer, and not a global minimizer.
optimalSwitchingTime.py code¶
Below is the entire script used in this section of the tutorial.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 | # optimalSwitchingTime.py
# Import necessary python modules
import math
from math import pi
import numpy as np
from numpy import dot
import trep
import trep.discopt
from trep import tx, ty, tz, rx, ry, rz
import pylab
# Build a pendulum system
m = 1.0 # Mass of pendulum
l = 1.0 # Length of pendulum
q0 = 0. # Initial configuration of pendulum
t0 = 0.0 # Initial time
tf = 10.0 # Final time
dt = 0.01 # Sampling time
qBar = pi # Desired configuration
Qi = np.eye(2) # Cost weights for states
Ri = np.eye(1) # Cost weights for inputs
uMax = 5.0 # Max absolute input value
tau = 5.0 # Switching time
system = trep.System() # Initialize system
frames = [
rx('theta', name="pendulumShoulder"), [
tz(-l, name="pendulumArm", mass=m)]]
system.import_frames(frames) # Add frames
# Add forces to the system
trep.potentials.Gravity(system, (0, 0, -9.8)) # Add gravity
trep.forces.Damping(system, 1.0) # Add damping
trep.forces.ConfigForce(system, 'theta', 'theta-torque') # Add input
# Create and initialize the variational integrator
mvi = trep.MidpointVI(system)
mvi.initialize_from_configs(t0, np.array([q0]), t0+dt, np.array([q0]))
# Create discrete system
TVec = np.arange(t0, tf+dt, dt) # Initialize discrete time vector
dsys = trep.discopt.DSystem(mvi, TVec) # Initialize discrete system
xBar = dsys.build_state(qBar) # Create desired state configuration
# Design linear feedback controller
Qd = np.zeros((len(TVec), dsys.system.nQ)) # Initialize desired configuration trajectory
thetaIndex = dsys.system.get_config('theta').index # Find index of theta config variable
for i,t in enumerate(TVec):
Qd[i, thetaIndex] = qBar # Set desired configuration trajectory
(Xd, Ud) = dsys.build_trajectory(Qd) # Set desired state and input trajectory
Qk = lambda k: Qi # Create lambda function for state cost weights
Rk = lambda k: Ri # Create lambda function for input cost weights
KVec = dsys.calc_feedback_controller(Xd, Ud, Qk, Rk) # Solve for linear feedback controller gain
KStabilize = KVec[0] # Use only use first value to approximate infinite-horizon optimal controller gain
# Design energy shaping swing-up controller
system.get_config('theta').q = qBar
eBar = system.total_energy()
KEnergy = 1
# Create cost
cost = trep.discopt.DCost(Xd, Ud, Qi, Ri)
# Helper functions
def wrapTo2Pi(ang):
return ang % (2*pi)
def wrapToPi(ang):
return (ang + pi) % (2*pi) - pi
def simulateForward(tau, dsys, q0, xBar):
mvi = dsys.varint
tf = dsys.time[-1]
# Reset discrete system state
dsys.set(np.array([q0, 0.]), np.array([0.]), 0)
# Initial conditions
k = dsys.k
t = dsys.time[k]
q = mvi.q1
x = dsys.xk
fdx = dsys.fdx()
xTilde = np.array([wrapToPi(x[0] - xBar[0]), x[1]])
e = system.total_energy() # Get current energy of the system
eTilde = e - eBar # Get difference between desired energy and current energy
# Initial list variables
K = [k] # List to hold discrete update count
T = [t] # List to hold time values
Q = [q] # List to hold configuration values
X = [x] # List to hold state values
Fdx = [fdx] # List to hold partial to x
E = [e] # List to hold energy values
U = [] # List to hold input values
L = [] # List to hold cost values
# Simulate the system forward
while mvi.t1 < tf-dt:
if mvi.t1 < tau:
if x[1] == 0:
u = np.array([uMax]) # Kick if necessary
else:
u = np.array([-x[1]*KEnergy*eTilde]) # Swing-up controller
else:
u = -dot(KStabilize, xTilde) # Stabilizing controller
u = min(np.array([uMax]), max(np.array([-uMax]), u)) # Constrain input
dsys.step(u) # Step the system forward by one time step
# Update variables
k = dsys.k
t = TVec[k]
q = mvi.q1
x = dsys.xk
fdx = dsys.fdx()
xTilde = np.array([wrapToPi(x[0] - xBar[0]), x[1]])
e = system.total_energy()
eTilde = e - eBar
l = cost.l(np.array([wrapTo2Pi(x[0]), x[1]]), u, k)
# Append to lists
K.append(k)
T.append(t)
Q.append(q)
X.append(x)
Fdx.append(fdx)
E.append(e)
U.append(u)
L.append(l)
J = np.sum(L)
return (K, T, Q, X, Fdx, E, U, L, J)
# Optimize
cnt = 0
Tau = []
JVec = []
JdTau = float('Inf')
while cnt < 10 and abs(JdTau) > .001:
cnt = cnt + 1
# Simulate forward from 0 to tf
(K, T, Q, X, Fdx, E, U, L, J) = simulateForward(tau, dsys, q0, xBar)
# Simulate backward from tf to tau
k = K[-1]
lam = np.array([[0],[0]])
while T[k] > tau + dt/2:
lamDx = np.array([cost.l_dx(X[k], U[k-1], k)])
f2Dx = Fdx[k]
lamDt = -lamDx.T - dot(f2Dx.T,lam)
lam = lam - lamDt*dt
k = k - 1
# Calculate dynamics of swing-up controller at switching time
x = X[k]
xTilde = np.array([wrapToPi(x[0] - xBar[0]), x[1]])
u1 = -dot(KStabilize, xTilde)
u1 = min(np.array([uMax]), max(np.array([-uMax]), u1))
dsys.set(X[k], u1, k)
f1 = dsys.f()
# Calculate dynamics of stabilizing controller at switching time
eTilde = E[k] - eBar
u2 = np.array([-x[1]*KEnergy*eTilde])
u2 = min(np.array([uMax]), max(np.array([-uMax]), u2))
dsys.set(X[k], u2, k)
f2 = dsys.f()
# Calculate value of change in cost to change in switch time
JdTau = dot(f1-f2, lam)
# Armijo - used to determine step size
chi = 0
alpha = .5
beta = .1
tauTemp = tau - (alpha**chi)*JdTau
(KTemp, TTemp, QTemp, XTemp, FdxTemp, ETemp, UTemp, LTemp, JTemp) = simulateForward(tauTemp, dsys, q0, xBar)
while JTemp > J + (alpha**chi)*beta*(JdTau**2):
tauTemp = tau - (alpha**chi)*JdTau
(KTemp, TTemp, QTemp, XTemp, FdxTemp, ETemp, UTemp, LTemp, JTemp) = simulateForward(tauTemp, dsys, q0, xBar)
chi = chi + 1
gamma = alpha**chi # Step size
# Calculate new switching time
tauPlus = tau - gamma*JdTau
# Print iteration results
print "Optimization iteration: %d" % cnt
print "Current switch time: %.2f" % tau
print "New switch time: %.2f" % tauPlus
print "Current cost: %.2f" % J
print "Parital of cost to switch time: %.2f" % JdTau
print ""
# Update to new switching time
tau = tauPlus
print "Optimal switch time: %.2f" % tau
# Simulate with optimal switching time
(K, T, Q, X, Fdx, E, U, L, J) = simulateForward(tau, dsys, q0, xBar)
# Visualize the system in action
trep.visual.visualize_3d([ trep.visual.VisualItem3D(system, T, Q) ])
# Plot results
ax1 = pylab.subplot(311)
pylab.plot(T, X)
pylab.title("Swing-up and stabilize with optimal switching time")
pylab.ylabel("X")
pylab.legend(["qd","p"])
pylab.subplot(312, sharex=ax1)
pylab.plot(T[1:], U)
pylab.xlabel("T")
pylab.ylabel("U")
pylab.subplot(313, sharex=ax1)
pylab.plot(T[1:], L)
pylab.xlabel("T")
pylab.ylabel("L")
pylab.show()
|