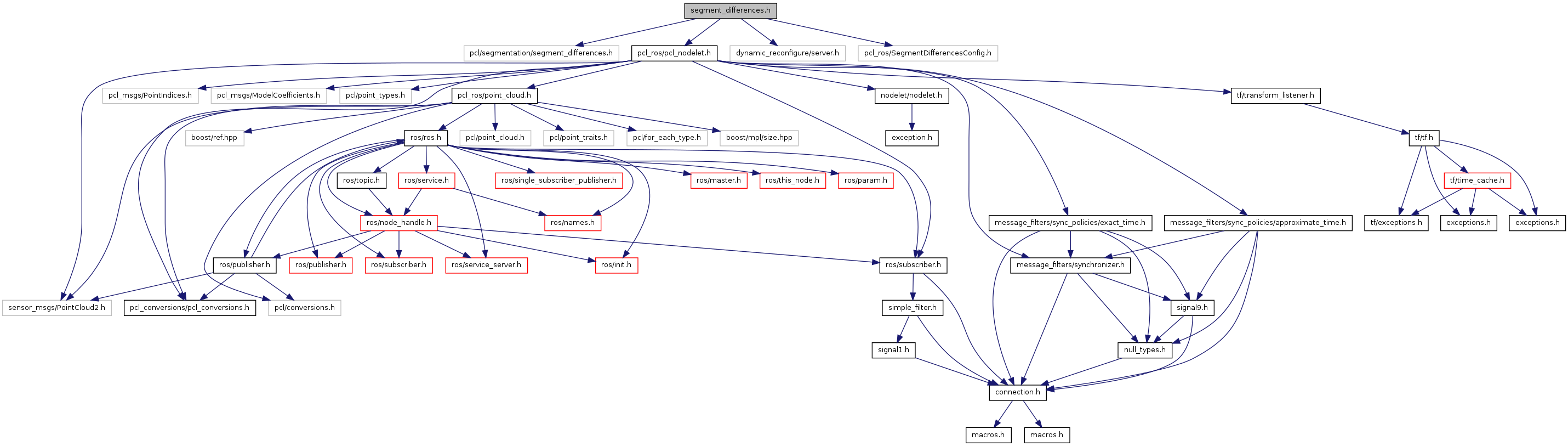
#include <pcl/segmentation/segment_differences.h>#include "pcl_ros/pcl_nodelet.h"#include <dynamic_reconfigure/server.h>#include "pcl_ros/SegmentDifferencesConfig.h"
Include dependency graph for segment_differences.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl_ros::SegmentDifferences |
| SegmentDifferences obtains the difference between two spatially aligned point clouds and returns the difference between them for a maximum given distance threshold. More... | |
Namespaces | |
| namespace | pcl_ros |