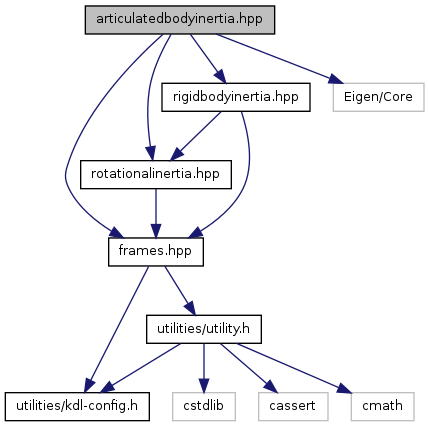
#include "frames.hpp"#include "rotationalinertia.hpp"#include "rigidbodyinertia.hpp"#include <Eigen/Core>
Include dependency graph for articulatedbodyinertia.hpp:
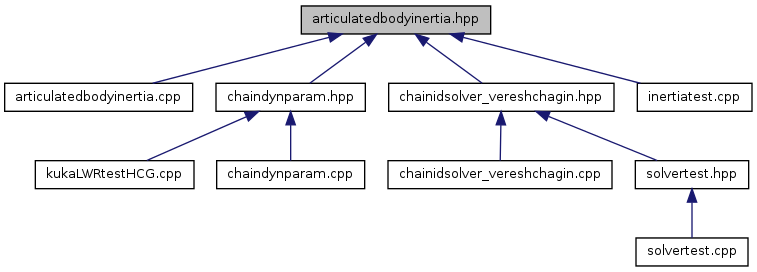
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | KDL::ArticulatedBodyInertia |
| 6D Inertia of a articulated body More... | |
Namespaces | |
| namespace | KDL |
Functions | |
| ArticulatedBodyInertia | KDL::operator* (double a, const ArticulatedBodyInertia &I) |
| Wrench | KDL::operator* (const ArticulatedBodyInertia &I, const Twist &t) |
| ArticulatedBodyInertia | KDL::operator* (const Frame &T, const ArticulatedBodyInertia &I) |
| ArticulatedBodyInertia | KDL::operator* (const Rotation &M, const ArticulatedBodyInertia &I) |
| ArticulatedBodyInertia | KDL::operator+ (const ArticulatedBodyInertia &Ia, const ArticulatedBodyInertia &Ib) |
| ArticulatedBodyInertia | KDL::operator+ (const ArticulatedBodyInertia &Ia, const RigidBodyInertia &Ib) |
| ArticulatedBodyInertia | KDL::operator- (const ArticulatedBodyInertia &Ia, const ArticulatedBodyInertia &Ib) |
| ArticulatedBodyInertia | KDL::operator- (const ArticulatedBodyInertia &Ia, const RigidBodyInertia &Ib) |