Trajectory generation for manipulators. More...
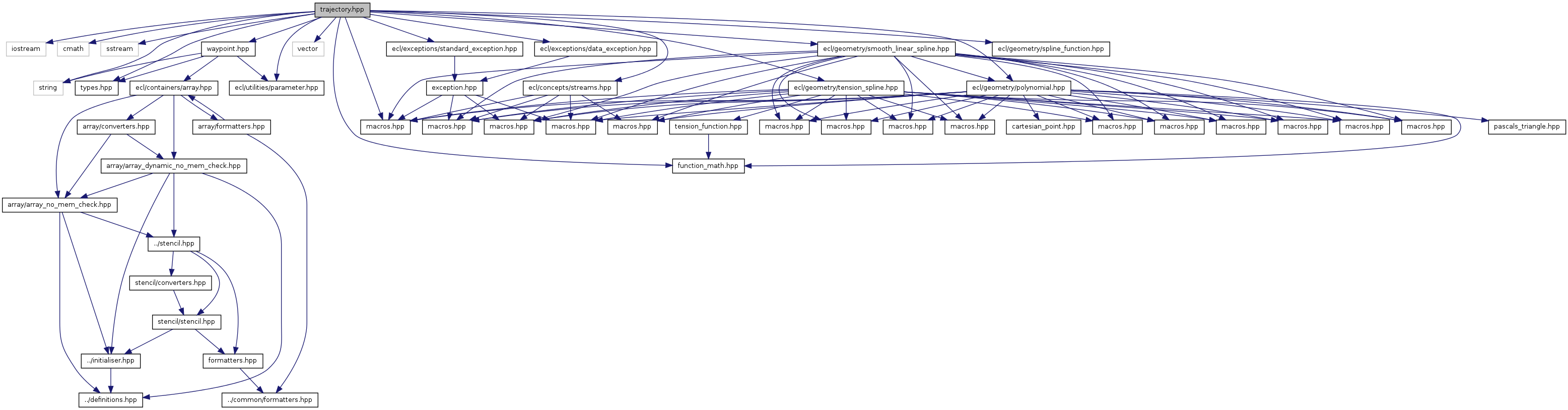
#include <iostream>#include <cmath>#include <sstream>#include <string>#include <vector>#include "types.hpp"#include "waypoint.hpp"#include <ecl/geometry/polynomial.hpp>#include <ecl/geometry/function_math.hpp>#include <ecl/geometry/smooth_linear_spline.hpp>#include <ecl/geometry/spline_function.hpp>#include <ecl/geometry/tension_spline.hpp>#include <ecl/concepts/streams.hpp>#include <ecl/exceptions/macros.hpp>#include <ecl/exceptions/data_exception.hpp>#include <ecl/exceptions/standard_exception.hpp>#include <ecl/utilities/parameter.hpp>
Include dependency graph for trajectory.hpp:
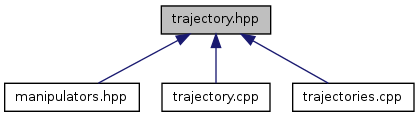
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ecl::Trajectory< Type > |
| Primary template for manipulator trajectories. More... | |
| class | ecl::Trajectory< JointAngles > |
| Joint angle based manipulator trajectory. More... | |
Namespaces | |
| namespace | ecl |
Functions | |
| template<typename OutputStream > | |
| OutputStream & | ecl::operator<< (OutputStream &ostream, Trajectory< JointAngles > &trajectory) |