#include <boost/shared_ptr.hpp>#include <boost/asio/streambuf.hpp>#include <sstream>#include <vector>#include <cstdint>
Include dependency graph for tritechfwd.hpp:

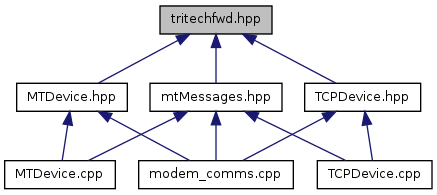
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | labust |
| namespace | labust::tritech |
| namespace | labust::tritech::Nodes |
Typedefs | |
| typedef std::vector< uint8_t > | labust::tritech::ByteVector |
| typedef boost::shared_ptr < MTDevice > | labust::tritech::MTDevicePtr |
| typedef boost::shared_ptr< MTMsg > | labust::tritech::MTMsgPtr |
| typedef boost::shared_ptr < boost::asio::streambuf > | labust::tritech::StreamPtr |
| typedef boost::shared_ptr < TCONMsg > | labust::tritech::TCONMsgPtr |
| typedef boost::shared_ptr < TCPDevice > | labust::tritech::TCPDevicePtr |
Enumerations | |
| enum | AttitudeSensorCmd { labust::tritech::attsen_idle = 0, labust::tritech::attsen_RunRaw, labust::tritech::attsen_RunProc, labust::tritech::attsen_Reset, labust::tritech::attsen_CalMag, labust::tritech::attsen_CalGrv, labust::tritech::attsen_CalRate, labust::tritech::attsen_CalPress, labust::tritech::attsen_CalTemp, labust::tritech::attsen_CalCompass } |
| enum | labust::tritech::Nodes::Node { labust::tritech::Nodes::Sonar = 2, labust::tritech::Nodes::AttitudeSensor = 75, labust::tritech::Nodes::MasterModem = 85, labust::tritech::Nodes::SlaveModem = 86, labust::tritech::Nodes::USBL = 90, labust::tritech::Nodes::GPS = 245, labust::tritech::Nodes::Surface = 255, labust::tritech::Nodes::mtAll = 255 } |