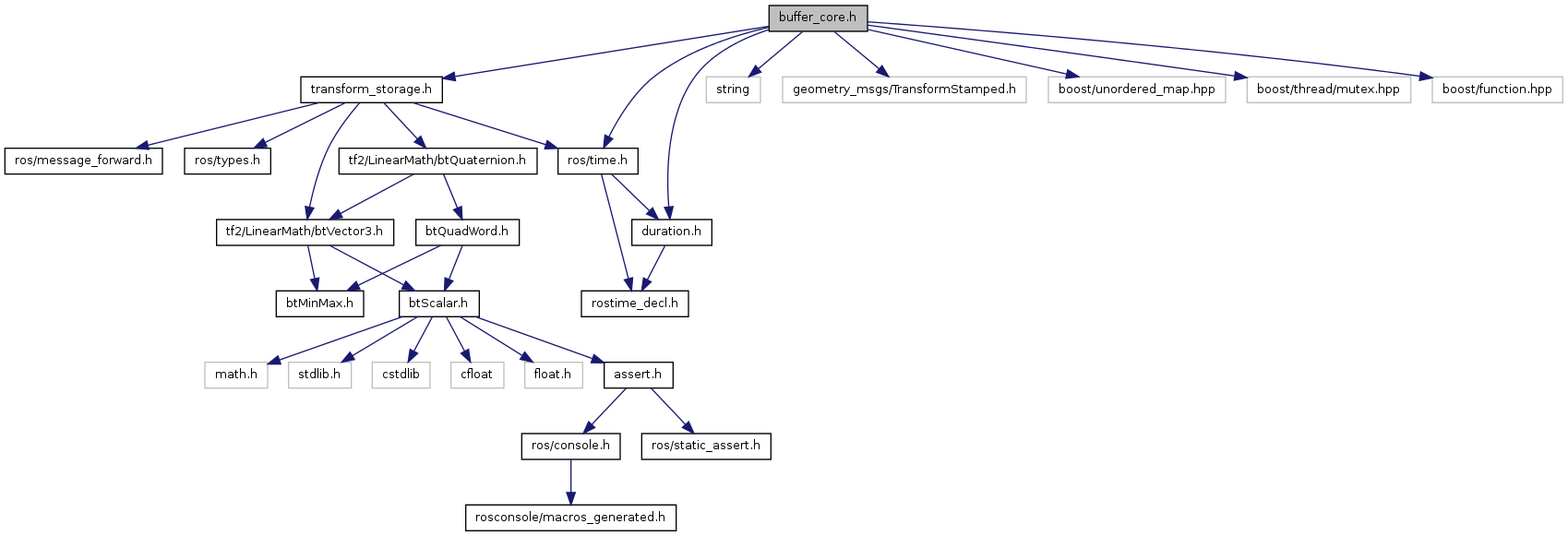
#include "transform_storage.h"#include <string>#include "ros/duration.h"#include "ros/time.h"#include "geometry_msgs/TransformStamped.h"#include <boost/unordered_map.hpp>#include <boost/thread/mutex.hpp>#include <boost/function.hpp>
Include dependency graph for buffer_core.h:
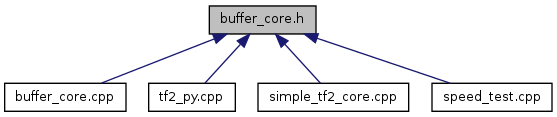
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | tf2::BufferCore |
| A Class which provides coordinate transforms between any two frames in a system. More... | |
| struct | tf2::BufferCore::TransformableRequest |
Namespaces | |
| namespace | tf2 |
Typedefs | |
| typedef std::pair< ros::Time, CompactFrameID > | tf2::P_TimeAndFrameID |
| typedef uint32_t | tf2::TransformableCallbackHandle |
| typedef uint64_t | tf2::TransformableRequestHandle |
Enumerations | |
| enum | tf2::TransformableResult { tf2::TransformAvailable, tf2::TransformFailure } |