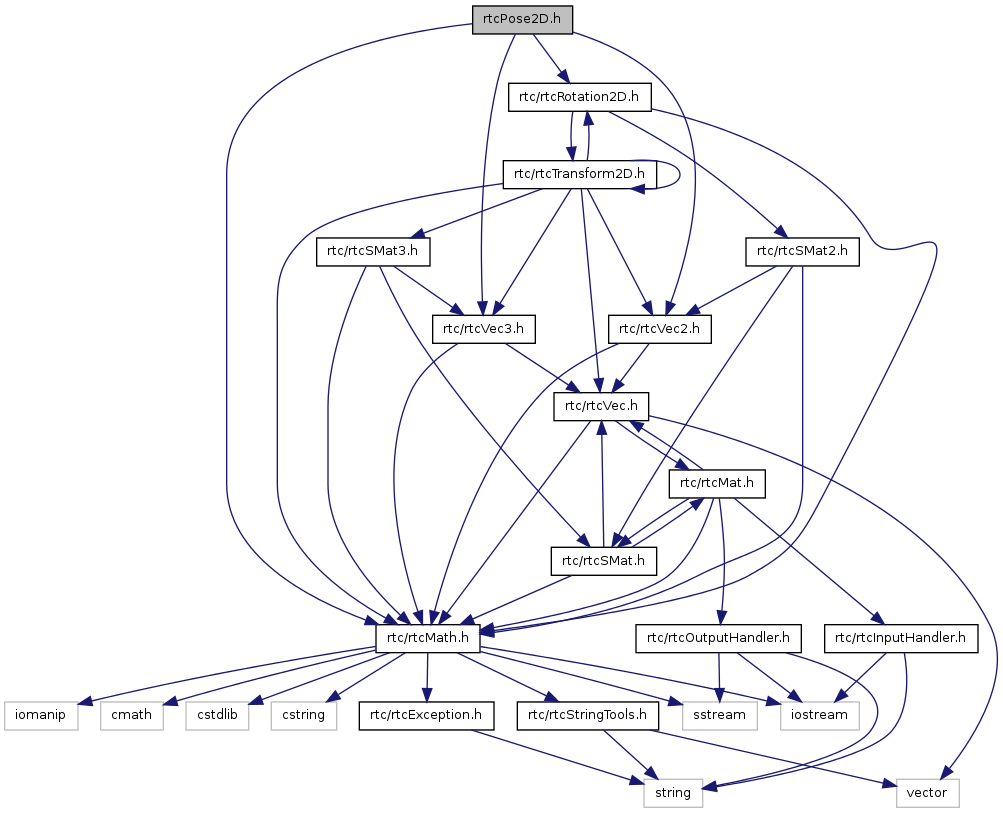
#include "rtc/rtcMath.h"#include "rtc/rtcVec2.h"#include "rtc/rtcVec3.h"#include "rtc/rtcRotation2D.h"
Include dependency graph for rtcPose2D.h:
Go to the source code of this file.
Classes | |
| class | rtc::Pose2D |
Namespaces | |
| namespace | rtc |
Functions | |
| std::ostream & | rtc::operator<< (std::ostream &os, const Pose2D &pose) |
| std::istream & | rtc::operator>> (std::istream &is, Pose2D &pose) |
| bool | rtc::rtc_read (InputHandler &ih, Pose2D &data) |
| bool | rtc::rtc_write (OutputHandler &oh, const Pose2D &data) |