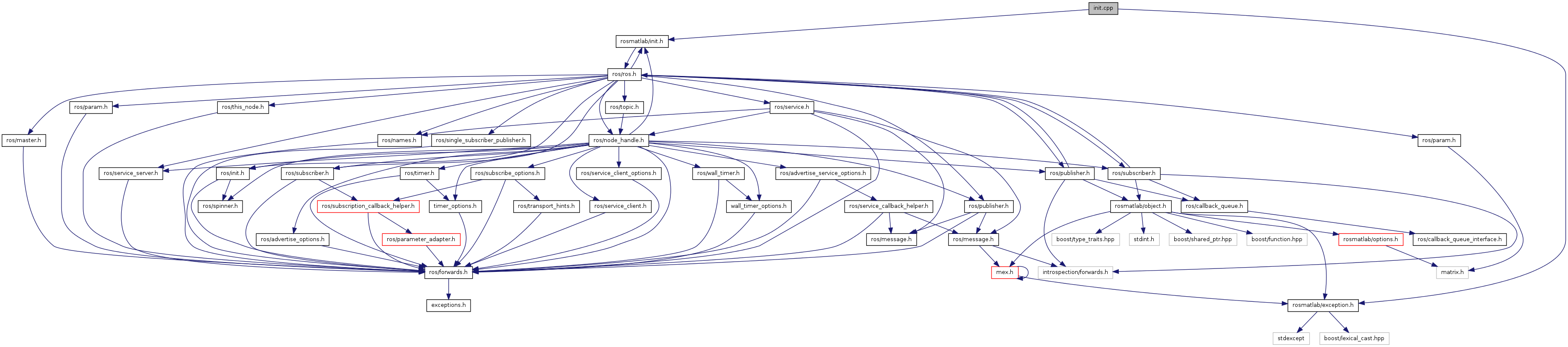
Include dependency graph for init.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | rosmatlab |
Functions | |
| void | rosmatlab::init () |
| ros::NodeHandle & | rosmatlab::nodeHandle () |
| void | rosmatlab::shutdown () |
Variables | |
| ros::NodeHandle * | rosmatlab::node_handle_ = 0 |
| ros::AsyncSpinner * | rosmatlab::spinner_ = 0 |