Ros communication central! More...
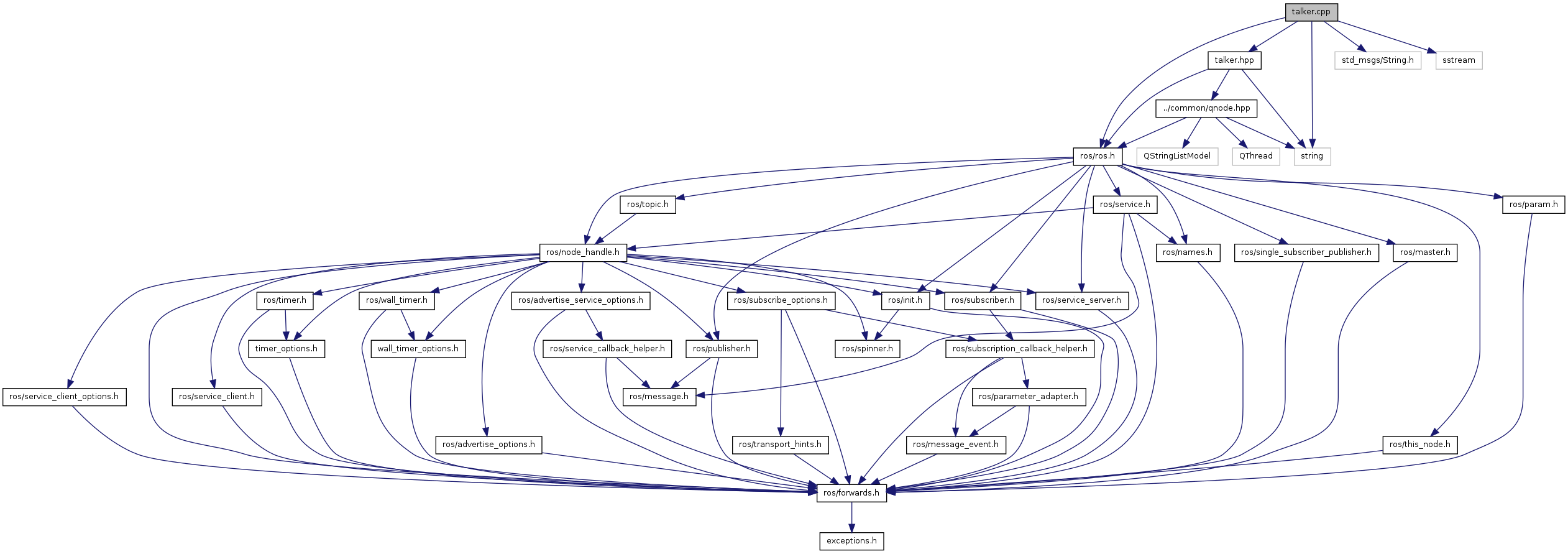
#include <ros/ros.h>#include <string>#include "talker.hpp"#include <std_msgs/String.h>#include <sstream>
Include dependency graph for talker.cpp:
Go to the source code of this file.
Ros communication central! More...
#include <ros/ros.h>#include <string>#include "talker.hpp"#include <std_msgs/String.h>#include <sstream>Go to the source code of this file.