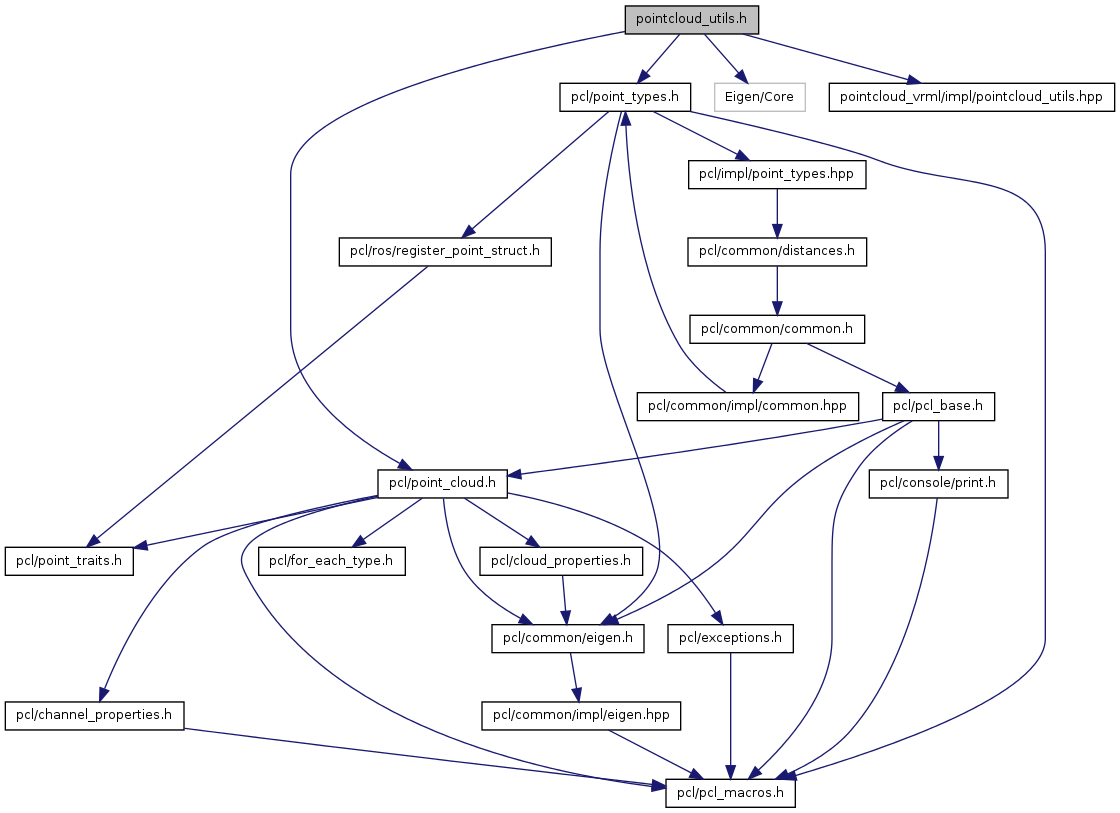
#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <Eigen/Core>#include <pointcloud_vrml/impl/pointcloud_utils.hpp>
Include dependency graph for pointcloud_utils.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | lslgeneric |
Functions | |
| template<typename PointT > | |
| double | lslgeneric::geomDist (PointT p1, PointT p2) |
| template<typename PointT > | |
| pcl::PointCloud< PointT > | lslgeneric::readVRML (const char *fname) |
| template<typename PointT > | |
| pcl::PointCloud< PointT > | lslgeneric::readVRML (FILE *vrml) |
| template<typename PointT > | |
| pcl::PointCloud< PointT > | lslgeneric::readVRMLIntensity (const char *fname) |
| with intensity info from the colors | |
| template<typename PointT > | |
| pcl::PointCloud< PointT > | lslgeneric::readVRMLIntensity (FILE *vrml) |
| template<typename PointT > | |
| pcl::PointCloud< PointT > | lslgeneric::transformPointCloud (Eigen::Transform< double, 3, Eigen::Affine, Eigen::ColMajor > &Tr, const pcl::PointCloud< PointT > &pc) |
| template<typename PointT > | |
| void | lslgeneric::transformPointCloudInPlace (Eigen::Transform< double, 3, Eigen::Affine, Eigen::ColMajor > &Tr, pcl::PointCloud< PointT > &pc) |
| template<typename PointT > | |
| void | lslgeneric::writeToVRML (const char *fname, pcl::PointCloud< PointT > &pc, Eigen::Vector3d col) |
| template<typename PointT > | |
| void | lslgeneric::writeToVRML (FILE *fout, pcl::PointCloud< PointT > &pc, Eigen::Vector3d col) |
| template<typename PointT > | |
| void | lslgeneric::writeToVRMLColor (const char *fname, pcl::PointCloud< PointT > &pc) |
| template<typename PointT > | |
| void | lslgeneric::writeToVRMLColor (FILE *fout, pcl::PointCloud< PointT > &pc) |
| template<typename PointT > | |
| void | lslgeneric::writeToVRMLIntensity (const char *fname, pcl::PointCloud< PointT > &pc, Eigen::Vector3d col) |
| template<typename PointT > | |
| void | lslgeneric::writeToVRMLIntensity (FILE *fout, pcl::PointCloud< PointT > &pc, Eigen::Vector3d col) |