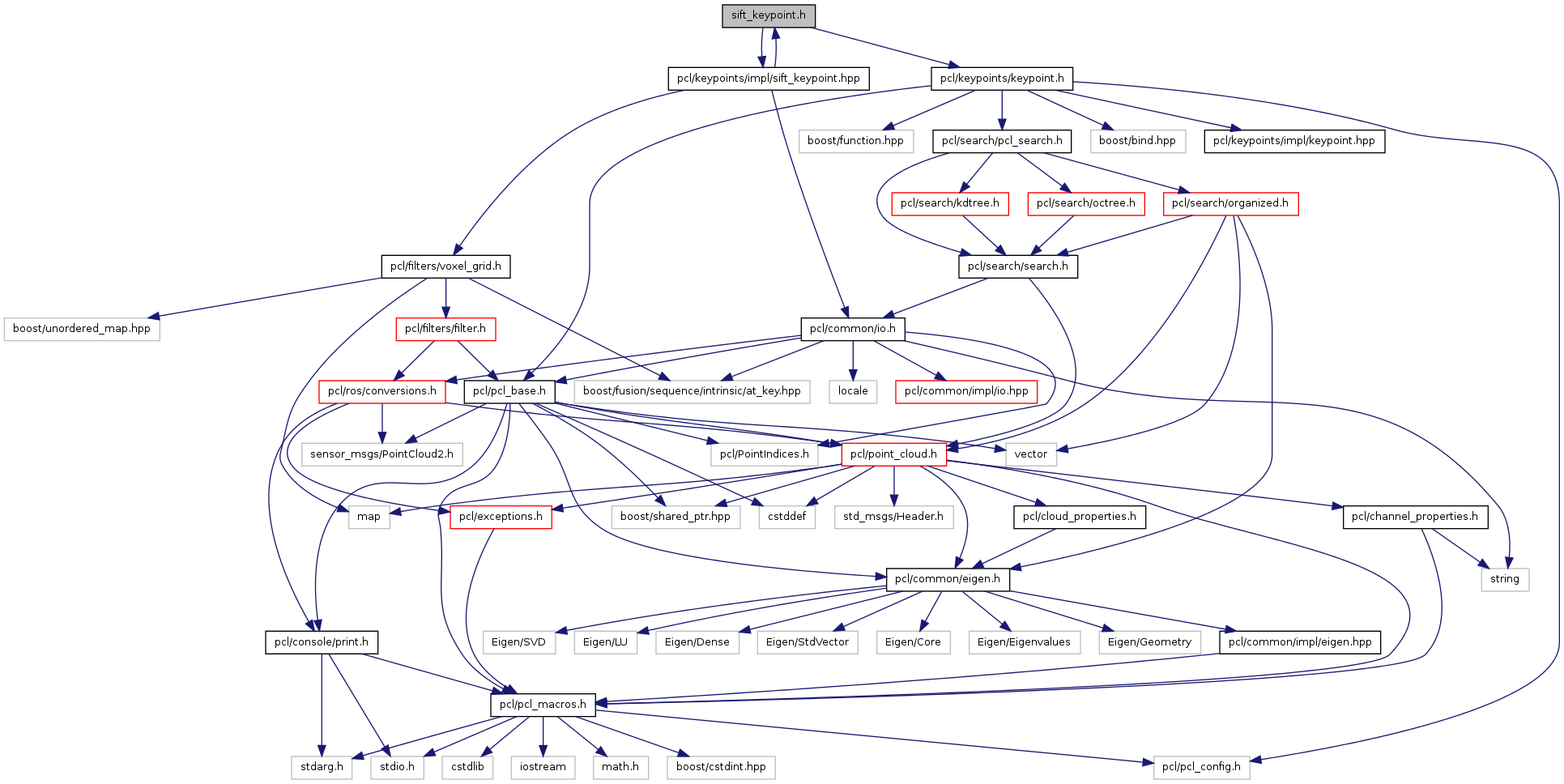
Include dependency graph for sift_keypoint.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::SIFTKeypoint< PointInT, PointOutT > |
| SIFTKeypoint detects the Scale Invariant Feature Transform keypoints for a given point cloud dataset containing points and intensity. This implementation adapts the original algorithm from images to point clouds. More... | |
| struct | pcl::SIFTKeypointFieldSelector< PointT > |
| struct | pcl::SIFTKeypointFieldSelector< PointNormal > |
| struct | pcl::SIFTKeypointFieldSelector< PointXYZRGB > |
| struct | pcl::SIFTKeypointFieldSelector< PointXYZRGBA > |
Namespaces | |
| namespace | pcl |