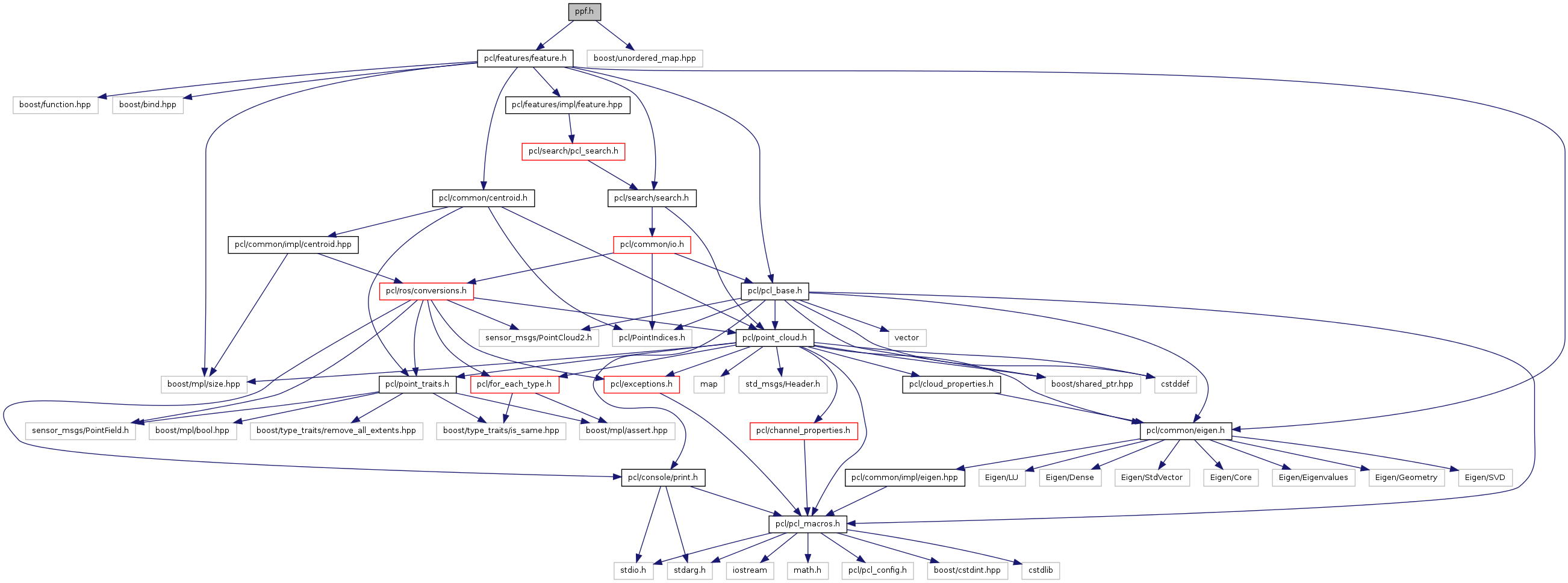
Include dependency graph for ppf.h:
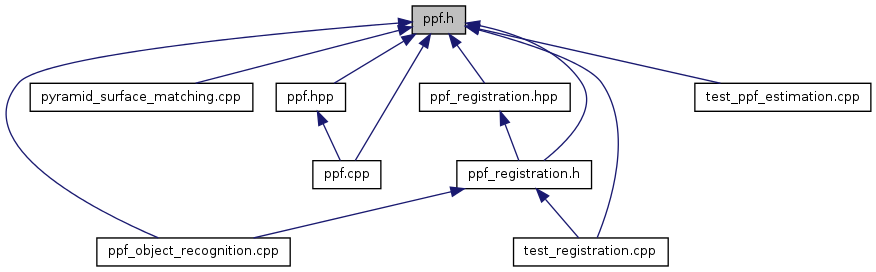
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::PPFEstimation< PointInT, PointNT, PointOutT > |
| Class that calculates the "surflet" features for each pair in the given pointcloud. Please refer to the following publication for more details: B. Drost, M. Ulrich, N. Navab, S. Ilic Model Globally, Match Locally: Efficient and Robust 3D Object Recognition 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 13-18 June 2010, San Francisco, CA. More... | |
| class | pcl::PPFEstimation< PointInT, PointNT, Eigen::MatrixXf > |
| Class that calculates the "surflet" features for each pair in the given pointcloud. Please refer to the following publication for more details: B. Drost, M. Ulrich, N. Navab, S. Ilic Model Globally, Match Locally: Efficient and Robust 3D Object Recognition 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 13-18 June 2010, San Francisco, CA. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| PCL_EXPORTS bool | pcl::computePPFPairFeature (const Eigen::Vector4f &p1, const Eigen::Vector4f &n1, const Eigen::Vector4f &p2, const Eigen::Vector4f &n2, float &f1, float &f2, float &f3, float &f4) |