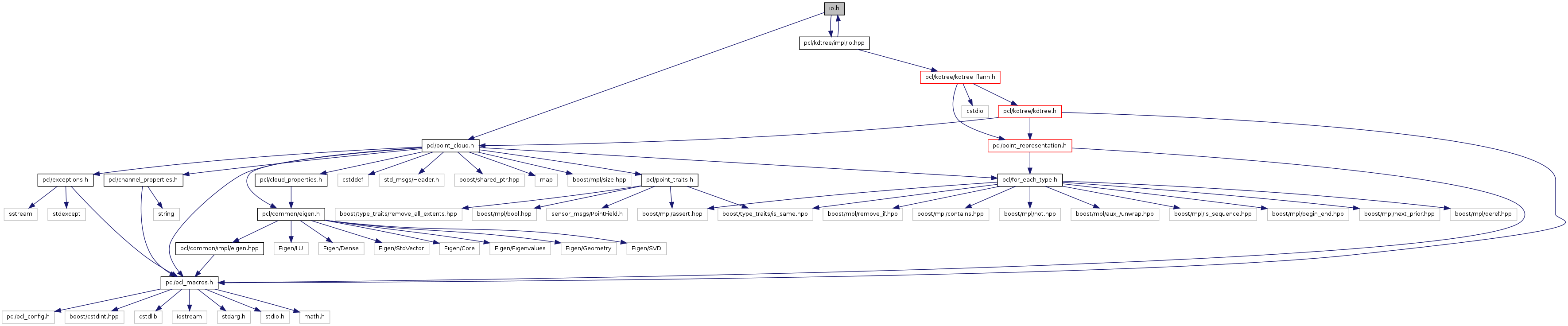
Include dependency graph for kdtree/include/pcl/kdtree/io.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | pcl |
Functions | |
| template<typename PointT > | |
| void | pcl::getApproximateIndices (const typename pcl::PointCloud< PointT >::Ptr &cloud_in, const typename pcl::PointCloud< PointT >::Ptr &cloud_ref, std::vector< int > &indices) |
| Get a set of approximate indices for a given point cloud into a reference point cloud. The coordinates of the two point clouds can differ. The method uses an internal KdTree for finding the closest neighbors from cloud_in in cloud_ref. | |
| template<typename Point1T , typename Point2T > | |
| void | pcl::getApproximateIndices (const typename pcl::PointCloud< Point1T >::Ptr &cloud_in, const typename pcl::PointCloud< Point2T >::Ptr &cloud_ref, std::vector< int > &indices) |
| Get a set of approximate indices for a given point cloud into a reference point cloud. The coordinates of the two point clouds can differ. The method uses an internal KdTree for finding the closest neighbors from cloud_in in cloud_ref. | |