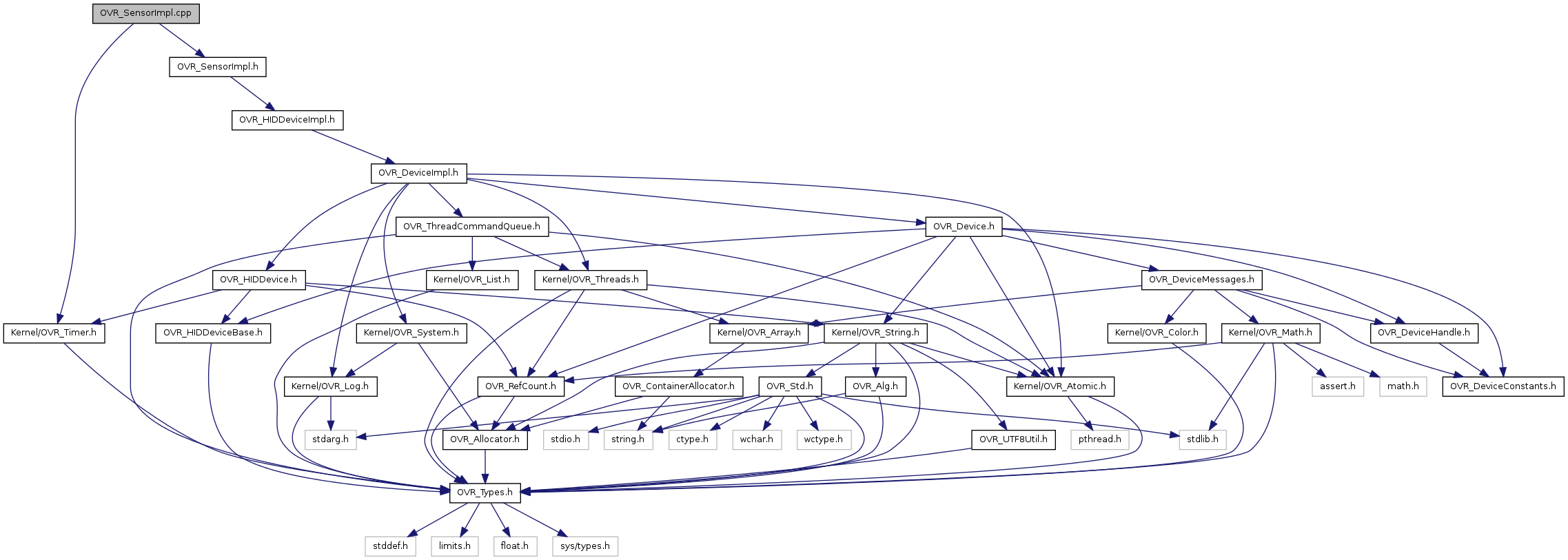
Include dependency graph for OVR_SensorImpl.cpp:
Go to the source code of this file.
Classes | |
| struct | OVR::SensorConfigImpl |
| struct | OVR::SensorKeepAliveImpl |
| struct | OVR::SensorRangeImpl |
| struct | OVR::TrackerMessage |
| struct | OVR::TrackerSample |
| struct | OVR::TrackerSensors |
Namespaces | |
| namespace | OVR |
Enumerations | |
| enum | { OVR::Sensor_VendorId = Oculus_VendorId, OVR::Sensor_ProductId = 0x0001, OVR::Sensor_OldVendorId = 0x0483, OVR::Sensor_OldProductId = 0x5750, OVR::Sensor_DefaultReportRate = 500, OVR::Sensor_MaxReportRate = 1000 } |
| enum | OVR::TrackerMessageType { OVR::TrackerMessage_None = 0, OVR::TrackerMessage_Sensors = 1, OVR::TrackerMessage_Unknown = 0x100, OVR::TrackerMessage_SizeError = 0x101 } |
Functions | |
| Vector3f | OVR::AccelFromBodyFrameUpdate (const TrackerSensors &update, UByte sampleNumber, bool convertHMDToSensor=false) |
| static float | OVR::DecodeFloat (const UByte *buffer) |
| static SInt16 | OVR::DecodeSInt16 (const UByte *buffer) |
| bool | OVR::DecodeTrackerMessage (TrackerMessage *message, UByte *buffer, int size) |
| static UInt16 | OVR::DecodeUInt16 (const UByte *buffer) |
| static UInt32 | OVR::DecodeUInt32 (const UByte *buffer) |
| Vector3f | OVR::EulerFromBodyFrameUpdate (const TrackerSensors &update, UByte sampleNumber, bool convertHMDToSensor=false) |
| Vector3f | OVR::MagFromBodyFrameUpdate (const TrackerSensors &update, bool convertHMDToSensor=false) |
| static UInt16 | OVR::SelectSensorRampValue (const UInt16 *ramp, unsigned count, float val, float factor, const char *label) |
| static void | OVR::UnpackSensor (const UByte *buffer, SInt32 *x, SInt32 *y, SInt32 *z) |
Variables | |
| static const UInt16 | OVR::AccelRangeRamp [] = { 2, 4, 8, 16 } |
| static const UInt16 | OVR::GyroRangeRamp [] = { 250, 500, 1000, 2000 } |
| static const UInt16 | OVR::MagRangeRamp [] = { 880, 1300, 1900, 2500 } |