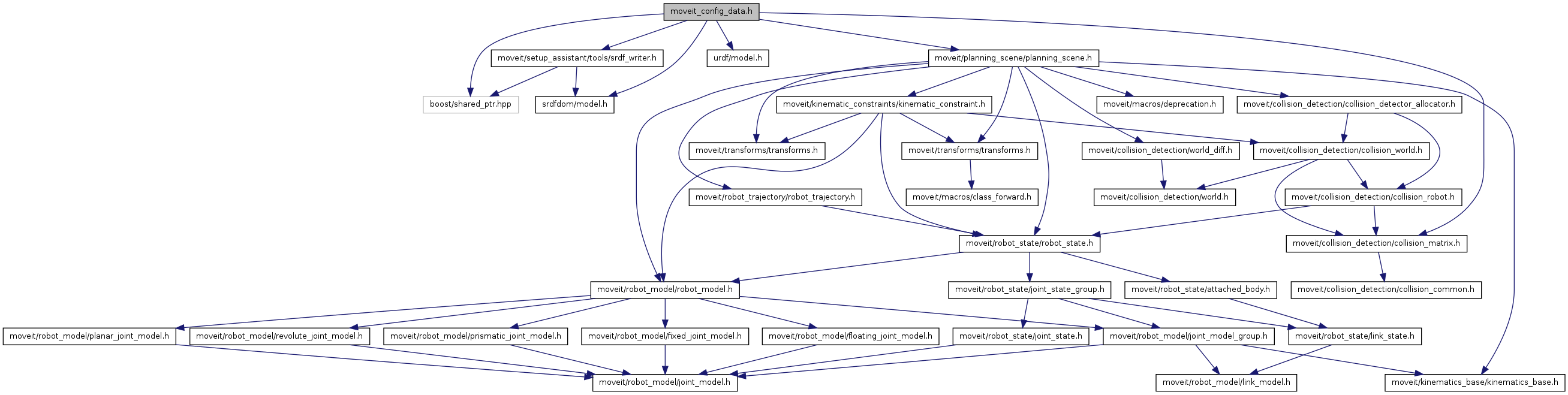
#include <boost/shared_ptr.hpp>#include <srdfdom/model.h>#include <urdf/model.h>#include <moveit/setup_assistant/tools/srdf_writer.h>#include <moveit/planning_scene/planning_scene.h>#include <moveit/collision_detection/collision_matrix.h>
Include dependency graph for moveit_config_data.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | moveit_setup_assistant::GroupMetaData |
| class | moveit_setup_assistant::MoveItConfigData |
Namespaces | |
| namespace | moveit_setup_assistant |
Typedefs | |
| typedef boost::shared_ptr < MoveItConfigData > | moveit_setup_assistant::MoveItConfigDataPtr |
| Create a shared pointer for passing this data object between widgets. | |
Variables | |
| static const int | moveit_setup_assistant::DEFAULT_KIN_SOLVER_ATTEMPTS_ = 3 |
| static const double | moveit_setup_assistant::DEFAULT_KIN_SOLVER_SEARCH_RESOLUTION_ = 0.005 |
| static const double | moveit_setup_assistant::DEFAULT_KIN_SOLVER_TIMEOUT_ = 0.005 |
| static const std::string | moveit_setup_assistant::MOVEIT_ROBOT_STATE = "moveit_robot_state" |
| static const std::string | moveit_setup_assistant::ROBOT_DESCRIPTION = "robot_description" |