#include <map>#include <string>#include <vector>#include <utility>#include <moveit_msgs/JointLimits.h>#include <random_numbers/random_numbers.h>#include <console_bridge/console.h>#include <Eigen/Geometry>
Include dependency graph for joint_model.h:

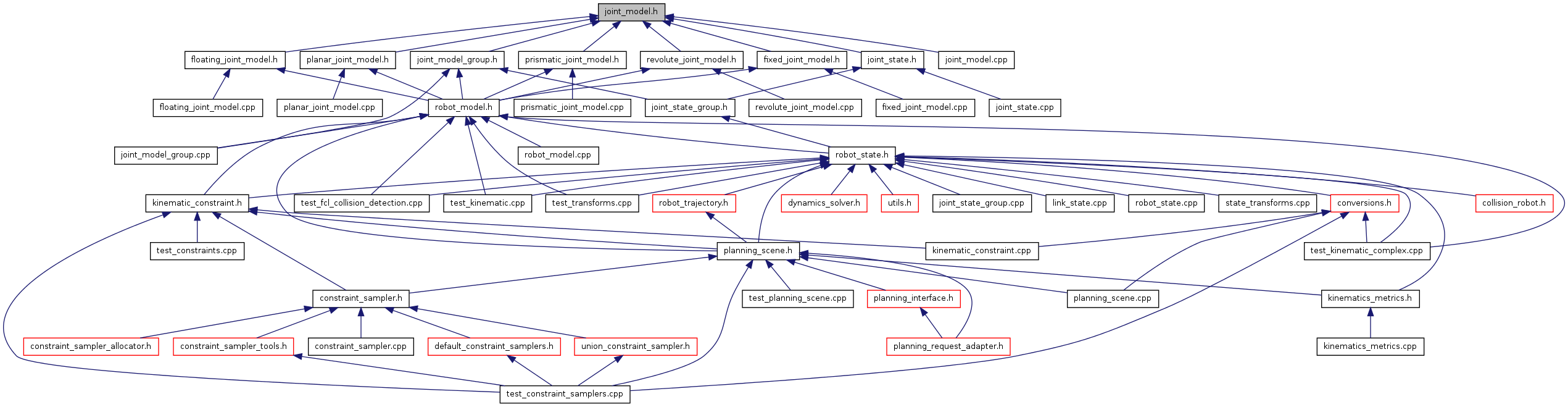
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robot_model::JointModel |
| A joint from the robot. Models the transform that this joint applies in the kinematic chain. A joint consists of multiple variables. In the simplest case, when the joint is a single DOF, there is only one variable and its name is the same as the joint's name. For multi-DOF joints, each variable has a local name (e.g., x, y) but the full variable name as seen from the outside of this class is a concatenation of the "joint name"/"local
name" (e.g., a joint named 'base' with local variables 'x' and 'y' will store its full variable names as 'base/x' and 'base/y'). Local names are never used to reference variables directly. More... | |
Namespaces | |
| namespace | robot_model |
Main namespace for representing robot planning models. | |