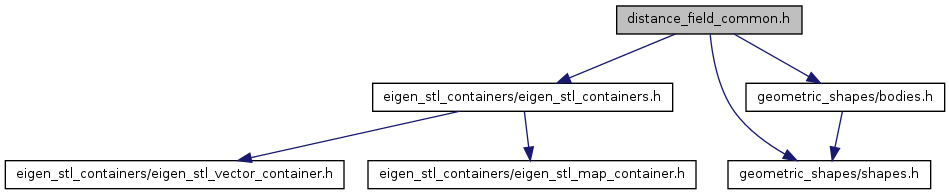
#include <eigen_stl_containers/eigen_stl_containers.h>#include <geometric_shapes/shapes.h>#include <geometric_shapes/bodies.h>
Include dependency graph for distance_field_common.h:
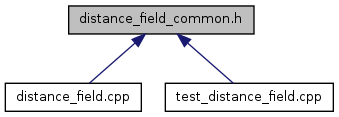
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | distance_field |
Namespace for holding classes that generate distance fields. | |
Functions | |
| static EigenSTL::vector_Vector3d | distance_field::determineCollisionPoints (const bodies::Body *body, double resolution) |
| Determines a set of obstacle points given a body and a particular resolution. | |