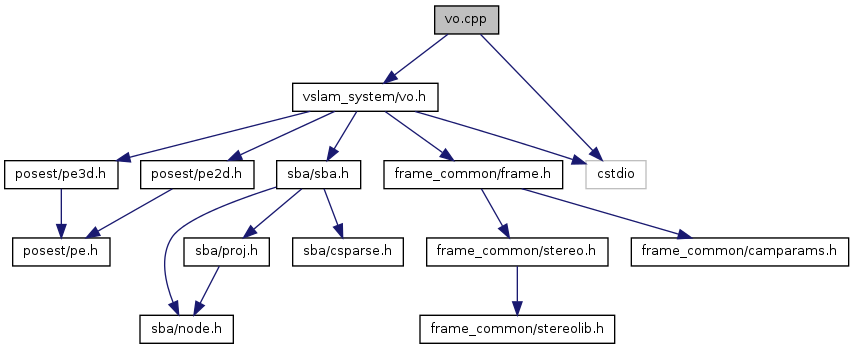
Include dependency graph for vo.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | vslam |
Functions | |
| void | vslam::addPointCloudProjections (fc::Frame &f0, fc::Frame &f1, sba::SysSBA &sba, const std::vector< cv::DMatch > &inliers, const Matrix< double, 3, 4 > &f2w_frame0, const Matrix< double, 3, 4 > &f2w_frame1, int ndi0, int ndi1, std::vector< int > *ipts=NULL) |
| Adds point-plane projections between two frames based on inlier matches. Adds any points not previously present in the external system, and fills in ipts. | |
| void | vslam::addProjections (fc::Frame &f0, fc::Frame &f1, std::vector< fc::Frame, Eigen::aligned_allocator< fc::Frame > > &frames, SysSBA &sba, const std::vector< cv::DMatch > &inliers, const Matrix< double, 3, 4 > &f2w, int ndi0, int ndi1, std::vector< int > *ipts) |
| Vector3d | vslam::getProjection (fc::Frame &frame, int index) |
| Get a Vector3d projection from a keypoint at index. | |
| void | vslam::substPointRef (std::vector< int > &ipts, int tri0, int tri1) |
| substitutes tri0 for tri1 in a point reference vector. | |