#include <cstddef>#include <stdint.h>#include <vector>#include <ros/console.h>#include <ros/serialization.h>
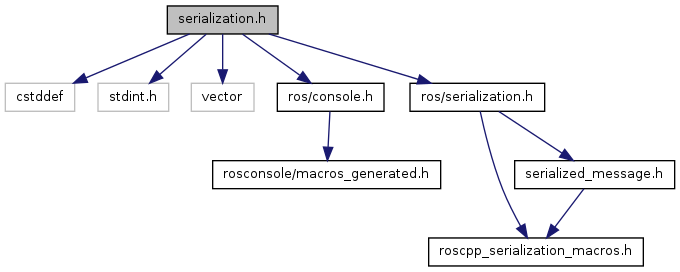
Include dependency graph for serialization.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | socrob |
SocRob project namespace. | |
| namespace | socrob::multicast |
SocRob Multicast library namespace. | |
Functions | |
| template<typename T > | |
| std::size_t | socrob::multicast::deserialize (T &msg, std::vector< uint8_t > &in, std::size_t offset=0) |
| Deserializes a ROS message. | |
| template<typename T > | |
| void | socrob::multicast::serialize_append (std::vector< uint8_t > &out, T const &msg) |
| Serializes a ROS message, appending the result to the given vector. | |
| template<typename T > | |
| void | socrob::multicast::serialize_overwrite (std::vector< uint8_t > &out, T const &msg) |
| Serializes a ROS message, overwritting the whole given vector. | |