#include <pcl_cloud_algos/cloud_algos.h>#include <pcl_cloud_algos/pcl_cloud_algos_point_types.h>#include <Eigen/Core>#include <Eigen/LU>#include <Eigen/Geometry>#include <sensor_msgs/PointCloud.h>#include <sensor_msgs/PointCloud2.h>#include <geometry_msgs/Point32.h>#include <triangle_mesh_msgs/TriangleMesh.h>#include <boost/thread/mutex.hpp>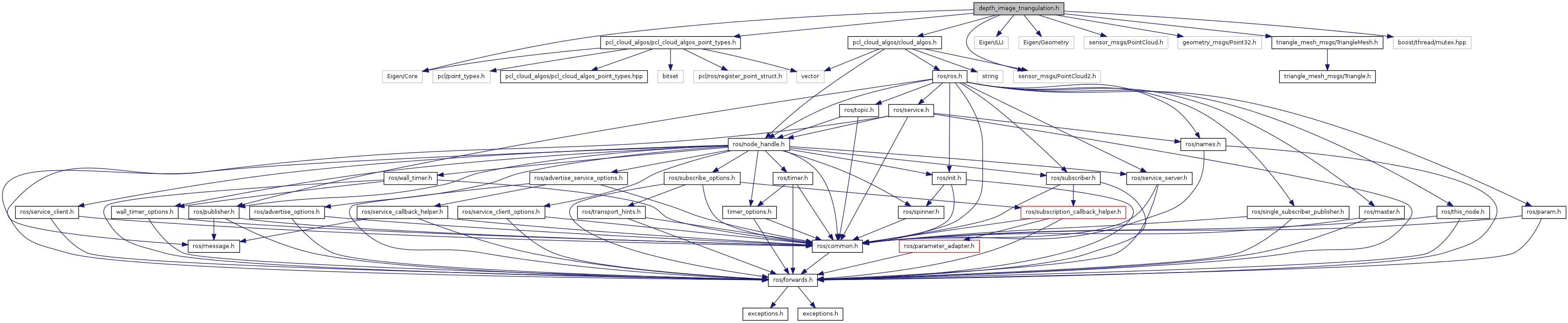
Go to the source code of this file.
Classes | |
| class | pcl_cloud_algos::DepthImageTriangulation |
| struct | pcl_cloud_algos::DepthImageTriangulation::triangle |
| triangle points More... | |
Namespaces | |
| namespace | pcl_cloud_algos |

