#include <iostream>#include <string.h>#include <algorithm>#include <stdarg.h>#include <cmath>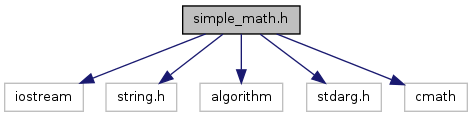
Go to the source code of this file.
Namespaces | |
| namespace | pangolin |
Functions | |
| template<typename P > | |
| void | pangolin::CrossProduct (P c[3], const P a[3], const P b[3]) |
| template<typename P > | |
| void | pangolin::EnforceUpT_cw (P T_cw_4x4[4 *4], const P up_w[3]) |
| template<typename P > | |
| void | pangolin::EnforceUpT_wc (P T_wc[3 *4], const P up_w[3]) |
| template<int R, typename P > | |
| P | pangolin::Length (P v[R]) |
| template<typename P > | |
| void | pangolin::LieApplySE3vec (P x_b[3], const P T_ba[3 *4], const P x_a[3]) |
| template<typename P > | |
| void | pangolin::LieApplySO3 (P out[3], const P R_ba[3 *3], const P in[3]) |
| template<typename P > | |
| void | pangolin::LieGetRotation (P R_ba[3 *3], const P T_ba[3 *4]) |
| template<typename P > | |
| void | pangolin::LieInverseSE3 (P T_ab[3 *4], const P T_ba[3 *4]) |
| template<typename P > | |
| void | pangolin::LieMul4x4bySE3 (P T_ca[4 *4], const P T_cb[3 *4], const P T_ba[4 *4]) |
| template<typename P > | |
| void | pangolin::LieMulSE3 (P T_ca[3 *4], const P T_cb[3 *4], const P T_ba[3 *4]) |
| template<typename P > | |
| void | pangolin::LieMulSO3 (P R_ca[3 *3], const P R_cb[3 *3], const P R_ba[3 *3]) |
| template<typename P > | |
| void | pangolin::LiePutSE3in4x4 (P out[4 *4], const P in[3 *4]) |
| template<typename P > | |
| void | pangolin::LieSE3from4x4 (P out[3 *4], const P in[4 *4]) |
| template<typename P > | |
| void | pangolin::LieSetIdentity (P T_ba[3 *4]) |
| template<typename P > | |
| void | pangolin::LieSetRotation (P T_ba[3 *4], const P R_ba[3 *3]) |
| template<typename P > | |
| void | pangolin::LieSetSE3 (P T_ba[3 *4], const P R_ba[3 *3], const P a_b[3]) |
| template<typename P > | |
| void | pangolin::LieSetTranslation (P T_ba[3 *4], const P a_b[3 *3]) |
| template<typename P > | |
| void | pangolin::LieTransposeSO3 (P R_ab[3 *3], const P R_ba[3 *3]) |
| template<int R, int C, typename P > | |
| void | pangolin::MatAdd (P m[R *C], const P m1[R *C], const P m2[R *C]) |
| template<int R, int M, int C, typename P > | |
| void | pangolin::MatMul (P mo[R *C], const P m1[R *M], const P m2[M *C]) |
| template<int R, int M, int C, typename P > | |
| void | pangolin::MatMul (P mo[R *C], const P m1[R *M], const P m2[M *C], P s) |
| template<int R, int C, typename P > | |
| void | pangolin::MatMul (P m[R *C], const P m1[R *C], P scalar) |
| template<int R, int C, typename P > | |
| void | pangolin::MatMul (P m[R *C], P scalar) |
| template<int R, int M, int C, typename P > | |
| void | pangolin::MatMulTranspose (P mo[R *C], const P m1[R *M], const P m2[C *M]) |
| template<int N, typename P > | |
| void | pangolin::MatOrtho (P m[N *N]) |
| template<int R, int C, typename P > | |
| void | pangolin::MatPrint (const P m[R *C]) |
| template<int R, int C, typename P > | |
| void | pangolin::MatPrint (const P m[R *C], std::string name) |
| template<int R, int C, typename P > | |
| void | pangolin::MatSet (P m[R *C],...) |
| template<typename P > | |
| void | pangolin::MatSkew (P s[3 *3], const P v[3]) |
| template<int R, int C, typename P > | |
| void | pangolin::MatSub (P m[R *C], const P m1[R *C], const P m2[R *C]) |
| template<int N, typename P > | |
| void | pangolin::MatTranspose (P out[N *N], const P in[N *N]) |
| template<int N, typename P > | |
| void | pangolin::MatTranspose (P m[N *N]) |
| template<int R, typename P > | |
| void | pangolin::Normalise (P v[R]) |
| template<typename P > | |
| void | pangolin::Rotation (P R[3 *3], P x, P y, P z) |
| template<int N, typename P > | |
| void | pangolin::SetIdentity (P m[N *N]) |
| template<int R, int C, typename P > | |
| void | pangolin::SetZero (P m[R *C]) |
Variables | |
| static const double | pangolin::Identity3d [] = {1,0,0, 0,1,0, 0,0,1} |
| static const float | pangolin::Identity3f [] = {1,0,0, 0,1,0, 0,0,1} |
| static const double | pangolin::Identity4d [] = {1,0,0,0, 0,1,0,0, 0,0,1,0, 0,0,0,1} |
| static const float | pangolin::Identity4f [] = {1,0,0,0, 0,1,0,0, 0,0,1,0, 0,0,0,1} |
| static const double | pangolin::Zero3d [] = {0,0,0, 0,0,0, 0,0,0} |
| static const float | pangolin::Zero3f [] = {0,0,0, 0,0,0, 0,0,0} |
| static const double | pangolin::Zero4d [] = {0,0,0,0, 0,0,0,0, 0,0,0,0, 0,0,0,0} |
| static const float | pangolin::Zero4f [] = {0,0,0,0, 0,0,0,0, 0,0,0,0, 0,0,0,0} |

