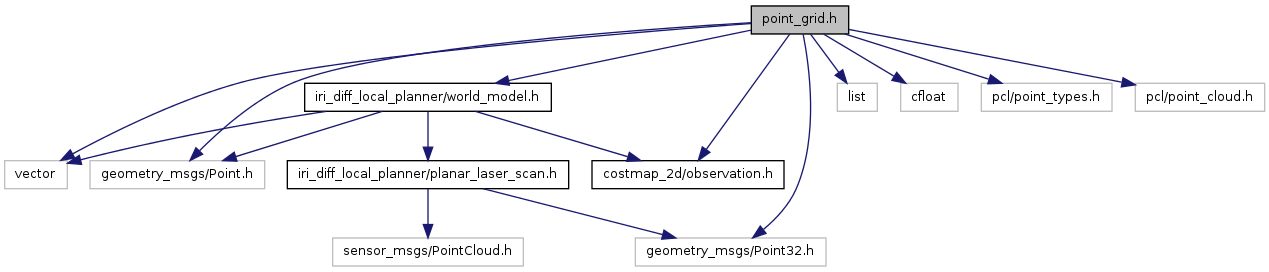
#include <vector>#include <list>#include <cfloat>#include <geometry_msgs/Point.h>#include <geometry_msgs/Point32.h>#include <costmap_2d/observation.h>#include <iri_diff_local_planner/world_model.h>#include <pcl/point_types.h>#include <pcl/point_cloud.h>
Include dependency graph for point_grid.h:
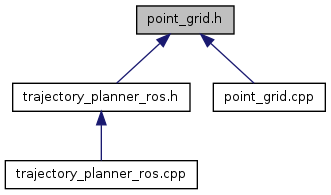
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | iri_diff_local_planner::PointGrid |
| A class that implements the WorldModel interface to provide free-space collision checks for the trajectory controller. This class stores points binned into a grid and performs point-in-polygon checks when necessary to determine the legality of a footprint at a given position/orientation. More... | |
Namespaces | |
| namespace | iri_diff_local_planner |