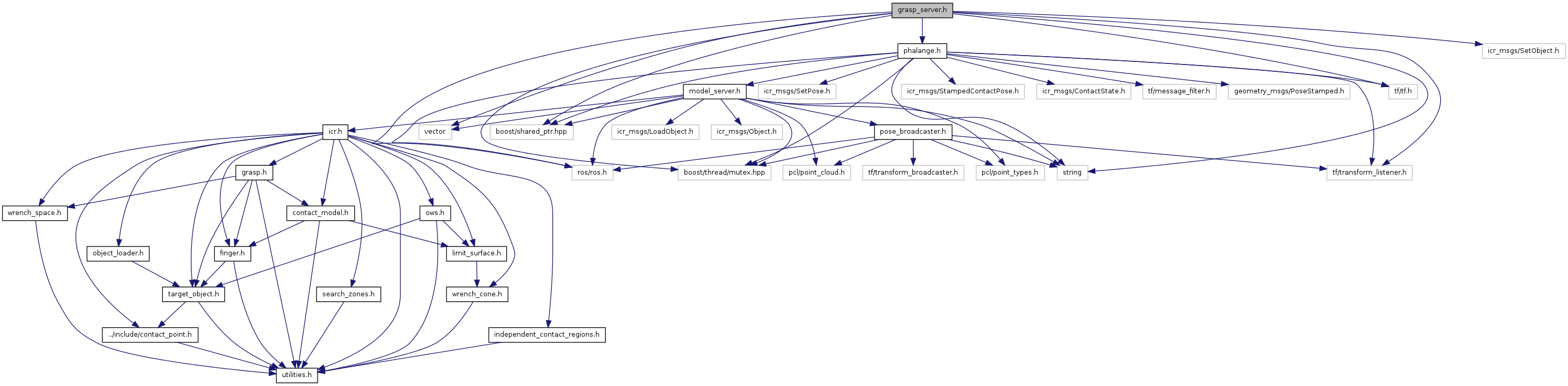
#include "ros/ros.h"#include <boost/thread/mutex.hpp>#include <boost/shared_ptr.hpp>#include "icr_msgs/SetObject.h"#include <vector>#include <string>#include "phalange.h"#include "tf/tf.h"#include <tf/transform_listener.h>
Include dependency graph for grasp_server.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ICR::GraspServer |
| Contains a list of Phalanges and publishes corresponding icr_msgs/ContactPoints messages. More... | |
Namespaces | |
| namespace | ICR |
Subscribes to gazebo_msgs/ContactsState outputted by the sensor_bumpers and computes the average contact position. | |