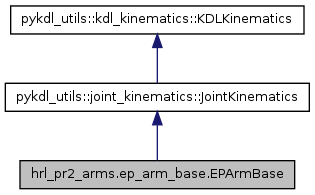
Base class for interacting with a realtime controller using an equilibrium point control frame work. More...
Public Member Functions | |
| def | __init__ |
| Constructor. | |
| def | get_controller_state |
| Returns the current state of the realtime controller. | |
| def | get_end_effector_pose |
| Returns the current pose of the tooltip. | |
| def | get_ep |
| Returns the current equilibrium point as read from the controller. | |
| def | is_ep_stale |
| Returns whether the equilibrium point has been recorded for some time. | |
| def | set_ep |
| Commands the arm to move to desired equilbrium point. | |
| def | wait_for_ep |
| Wait until we have the ep from the controller. | |
Public Attributes | |
| arm_side | |
| controller_name | |
| ctrl_state_dict | |
| ctrl_state_lock | |
| ep | |
| ep_lock | |
| ep_time | |
Private Member Functions | |
| def | _save_ep |
| Method to be implemented by subclasses to record the equilibrium point. | |
Detailed Description
Base class for interacting with a realtime controller using an equilibrium point control frame work.
An equilibrium point is a set of parameters representing the state of the controller at which no torques would be applied. For a PID controller, this represents the joint angles where the error would be zero.
Definition at line 51 of file ep_arm_base.py.
Constructor & Destructor Documentation
| def hrl_pr2_arms.ep_arm_base.EPArmBase.__init__ | ( | self, | |
| arm_side, | |||
| urdf, | |||
| base_link, | |||
| end_link, | |||
controller_name = None, |
|||
kdl_tree = None, |
|||
timeout = 1. |
|||
| ) |
Constructor.
- Parameters:
-
arm_side Used to signify side of robot for similar arms (e.g. 'r' for right, 'l' for left) urdf URDF object of robot. base_link Name of the root link of the kinematic chain. Will fill in arm_side if s is in string. end_link Name of the end link of the kinematic chain. Will fill in arm_side if s is in string. controller_name Optional name of the controller which will be subscribed to to obtain controller information kdl_tree Optional KDL.Tree object to use. If None, one will be generated from the URDF. timeout Time in seconds to wait for the /joint_states topic.
Definition at line 66 of file ep_arm_base.py.
Member Function Documentation
| def hrl_pr2_arms.ep_arm_base.EPArmBase._save_ep | ( | self, | |
| ep | |||
| ) | [private] |
Method to be implemented by subclasses to record the equilibrium point.
Definition at line 143 of file ep_arm_base.py.
Returns the current state of the realtime controller.
The state is filled in by the subclasses.
- Returns:
- dict with realtime controller information.
Definition at line 120 of file ep_arm_base.py.
Returns the current pose of the tooltip.
- Returns:
- 4x4 np.mat homogeneous matrix
Definition at line 86 of file ep_arm_base.py.
| def hrl_pr2_arms.ep_arm_base.EPArmBase.get_ep | ( | self | ) |
Returns the current equilibrium point as read from the controller.
- Returns:
- equilibrium point
Definition at line 92 of file ep_arm_base.py.
| def hrl_pr2_arms.ep_arm_base.EPArmBase.is_ep_stale | ( | self, | |
stale_time = 1. |
|||
| ) |
Returns whether the equilibrium point has been recorded for some time.
- Parameters:
-
stale_time Time in seconds to pass to consider the EP stale.
- Returns:
- True if the EP is stale.
Definition at line 134 of file ep_arm_base.py.
| def hrl_pr2_arms.ep_arm_base.EPArmBase.set_ep | ( | self, | |
| args | |||
| ) |
Commands the arm to move to desired equilbrium point.
Definition at line 100 of file ep_arm_base.py.
| def hrl_pr2_arms.ep_arm_base.EPArmBase.wait_for_ep | ( | self, | |
timeout = 1. |
|||
| ) |
Wait until we have the ep from the controller.
- Parameters:
-
timeout Time in seconds at which we break if we haven't recieved the EP.
Definition at line 106 of file ep_arm_base.py.
Member Data Documentation
Definition at line 66 of file ep_arm_base.py.
Definition at line 66 of file ep_arm_base.py.
Definition at line 66 of file ep_arm_base.py.
Definition at line 66 of file ep_arm_base.py.
Definition at line 66 of file ep_arm_base.py.
Definition at line 66 of file ep_arm_base.py.
Definition at line 66 of file ep_arm_base.py.
The documentation for this class was generated from the following file: