#include <rtt/Service.hpp>#include <hector_pose_estimation/system.h>#include <hector_pose_estimation/measurement.h>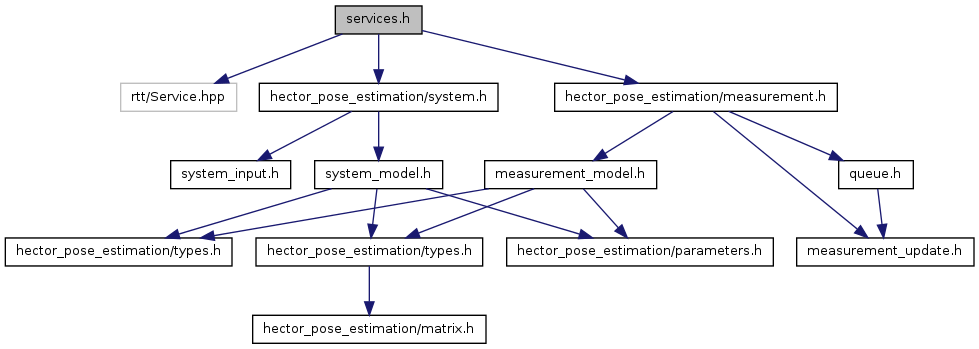
Go to the source code of this file.
Classes | |
| class | hector_pose_estimation::MeasurementService |
| class | hector_pose_estimation::SystemService |
Namespaces | |
| namespace | hector_pose_estimation |
Functions | |
| void | hector_pose_estimation::registerParamAsProperty (ParameterPtr ¶meter, RTT::PropertyBag *bag) |

