#include "ardrone_autonomy/navdata_demo.h"#include "ardrone_autonomy/navdata_time.h"#include "ardrone_autonomy/navdata_raw_measures.h"#include "ardrone_autonomy/navdata_phys_measures.h"#include "ardrone_autonomy/navdata_gyros_offsets.h"#include "ardrone_autonomy/navdata_euler_angles.h"#include "ardrone_autonomy/navdata_references.h"#include "ardrone_autonomy/navdata_trims.h"#include "ardrone_autonomy/navdata_rc_references.h"#include "ardrone_autonomy/navdata_pwm.h"#include "ardrone_autonomy/navdata_altitude.h"#include "ardrone_autonomy/navdata_vision_raw.h"#include "ardrone_autonomy/navdata_vision_of.h"#include "ardrone_autonomy/navdata_vision.h"#include "ardrone_autonomy/navdata_vision_perf.h"#include "ardrone_autonomy/navdata_trackers_send.h"#include "ardrone_autonomy/navdata_vision_detect.h"#include "ardrone_autonomy/navdata_watchdog.h"#include "ardrone_autonomy/navdata_adc_data_frame.h"#include "ardrone_autonomy/navdata_video_stream.h"#include "ardrone_autonomy/navdata_games.h"#include "ardrone_autonomy/navdata_pressure_raw.h"#include "ardrone_autonomy/navdata_magneto.h"#include "ardrone_autonomy/navdata_wind_speed.h"#include "ardrone_autonomy/navdata_kalman_pressure.h"#include "ardrone_autonomy/navdata_hdvideo_stream.h"#include "ardrone_autonomy/navdata_wifi.h"#include "ardrone_autonomy/navdata_zimmu_3000.h"#include <std_msgs/UInt16.h>#include <std_msgs/UInt32.h>#include <std_msgs/Float32.h>#include <std_msgs/Int32.h>#include <std_msgs/Int16.h>#include <std_msgs/UInt8.h>#include <ardrone_autonomy/vector31.h>#include <ardrone_autonomy/vector21.h>#include <ardrone_autonomy/matrix33.h>
Include dependency graph for NavdataMessageDefinitions.h:

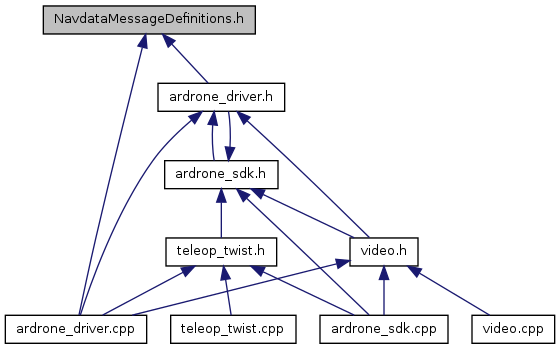
This graph shows which files directly or indirectly include this file: