Computes a reference velocity, acceleration or position for a control to try to reach. This is based on the current and desired velocity, acceleration and position. More...
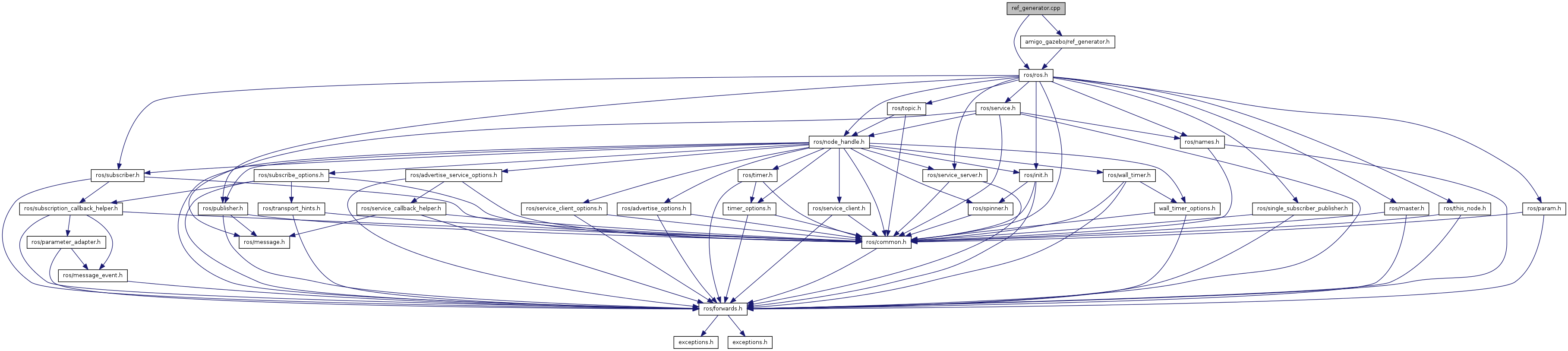
Include dependency graph for ref_generator.cpp:
Go to the source code of this file.
Detailed Description
Computes a reference velocity, acceleration or position for a control to try to reach. This is based on the current and desired velocity, acceleration and position.
- Date:
- December, 2012
- Version:
- 1.0
Definition in file ref_generator.cpp.