#include <iostream>#include <iomanip>#include <cmath>#include <vector>#include <sstream>#include <map>#include <tf/exceptions.h>#include "tf/time_cache.h"#include <boost/thread/recursive_mutex.hpp>#include <boost/unordered_map.hpp>#include <boost/signals.hpp>#include "geometry_msgs/TwistStamped.h"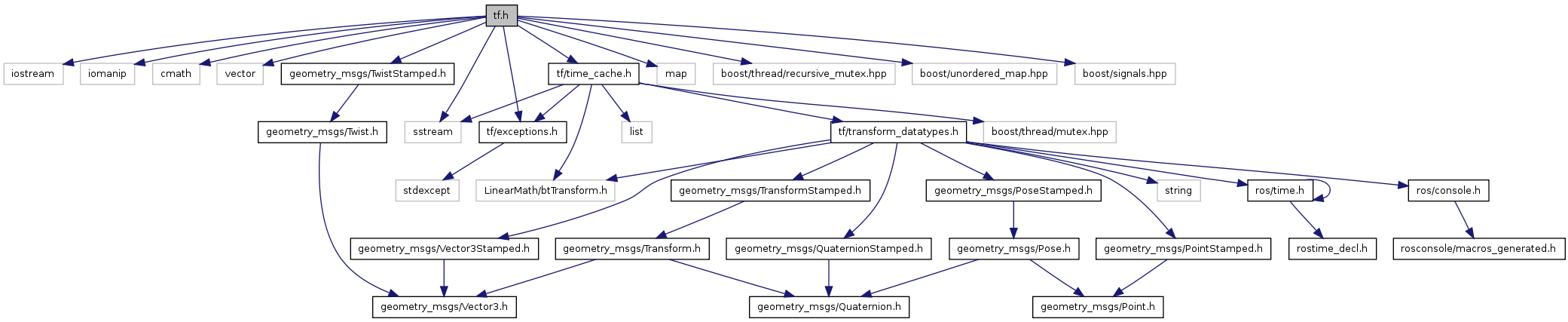

Go to the source code of this file.
Classes | |
| class | tf::Transformer |
| A Class which provides coordinate transforms between any two frames in a system. More... | |
| struct | tf::TransformLists |
| An internal representation of transform chains. More... | |
Namespaces | |
| namespace | tf |
Enumerations | |
| enum | tf::ErrorValues { tf::NO_ERROR = 0, tf::LOOKUP_ERROR, tf::CONNECTIVITY_ERROR, tf::EXTRAPOLATION_ERROR } |
Functions | |
| tf::__attribute__ ((deprecated)) static inline std | |
| void | tf::assertQuaternionValid (const geometry_msgs::Quaternion &q) |
| Throw InvalidArgument if quaternion is malformed. | |
| void | tf::assertQuaternionValid (const tf::Quaternion &q) |
| Throw InvalidArgument if quaternion is malformed. | |
| std::string | tf::resolve (const std::string &prefix, const std::string &frame_name) |
| resolve tf names | |

