#include "tracker.h"#include <tf/tf.h>#include <srs_msgs/PositionMeasurement.h>#include <wrappers/matrix/matrix_wrapper.h>#include <string>#include <filter/bootstrapfilter.h>#include <pdf/mcpdf.h>#include <sensor_msgs/PointCloud.h>#include <pdf/pdf.h>#include <model/measurementmodel.h>#include <pdf/conditionalpdf.h>#include "gaussian_vector.h"#include <model/systemmodel.h>#include <fstream>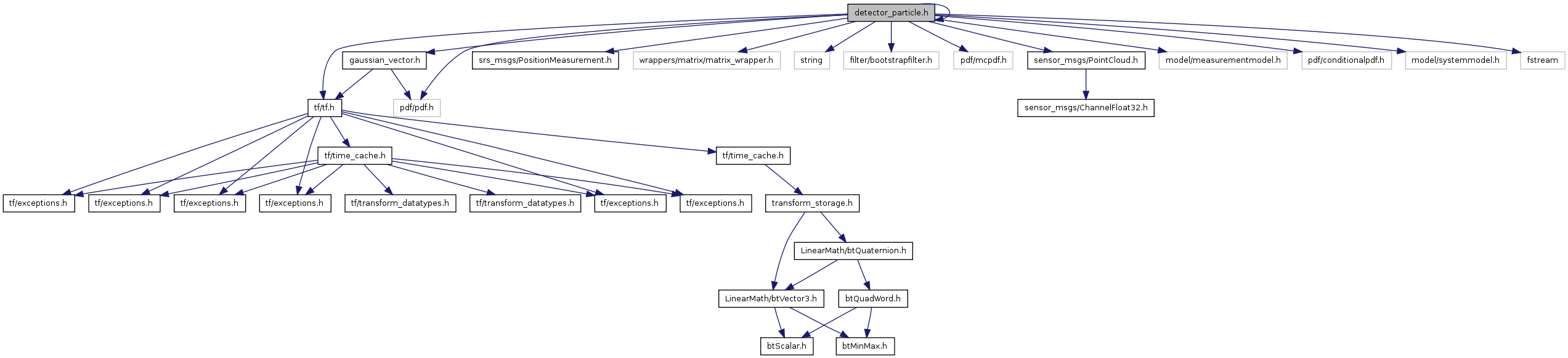
Go to the source code of this file.
Classes | |
| class | estimation::DetectorParticle |
Namespaces | |
| namespace | estimation |

