#include "kinematics.h"#include "utils.h"#include <stdio.h>#include <limits>#include "newmatap.h"#include "newmatio.h"#include "robot.h"#include <string>#include <queue>#include <vector>#include <map>#include "kinematics.h"#include "KatanaKinematicsDecisionAlgorithms.h"#include "MathHelperFunctions.h"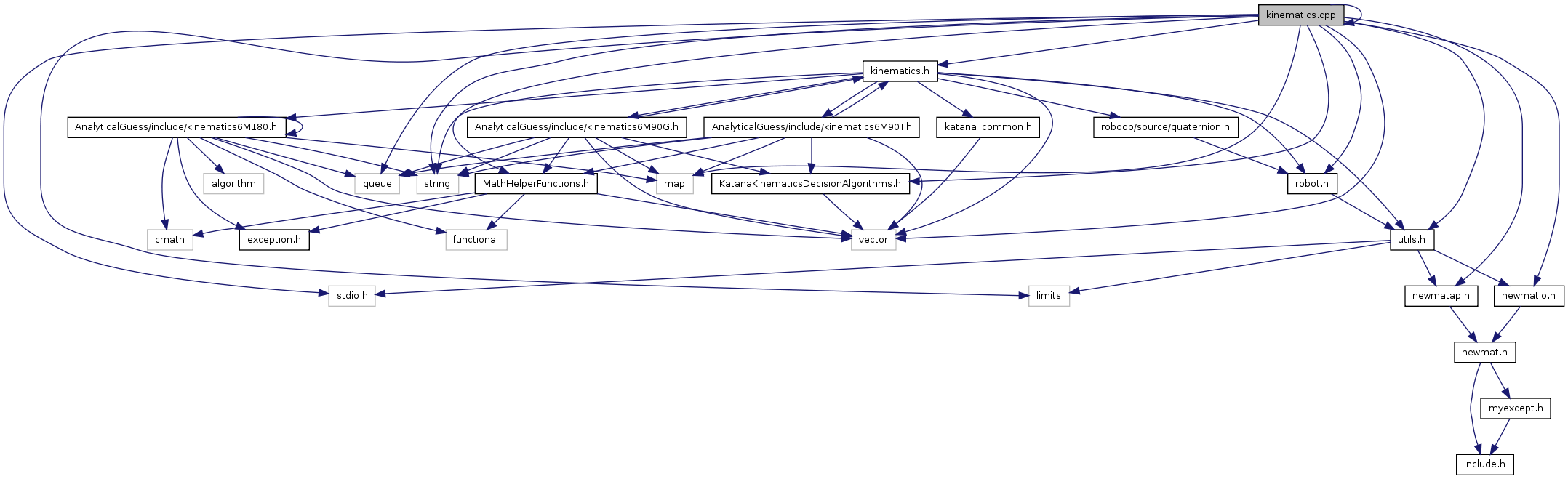

Go to the source code of this file.

