#include <map>#include <string>#include <vector>#include <ros/ros.h>#include <diagnostic_msgs/DiagnosticStatus.h>#include <diagnostic_msgs/KeyValue.h>#include <boost/shared_ptr.hpp>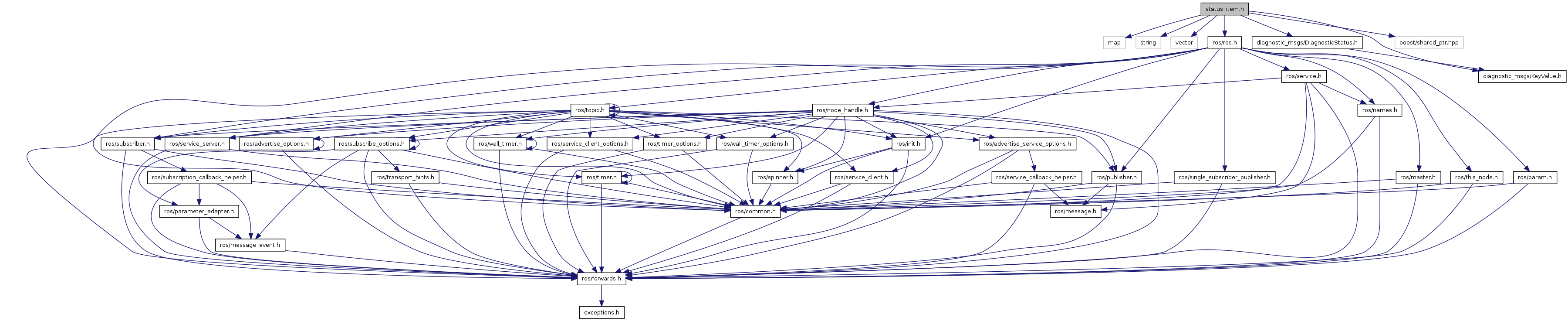
Go to the source code of this file.
Classes | |
| class | diagnostic_aggregator::StatusItem |
| Helper class to hold, store DiagnosticStatus messages. More... | |
Namespaces | |
| namespace | diagnostic_aggregator |
Enumerations | |
| enum | diagnostic_aggregator::DiagnosticLevel { diagnostic_aggregator::Level_OK = diagnostic_msgs::DiagnosticStatus::OK, diagnostic_aggregator::Level_Warn = diagnostic_msgs::DiagnosticStatus::WARN, diagnostic_aggregator::Level_Error = diagnostic_msgs::DiagnosticStatus::ERROR, diagnostic_aggregator::Level_Stale = 3 } |
Level of StatusItem. OK, Warn, Error, Stale. More... | |
Functions | |
| std::string | diagnostic_aggregator::getOutputName (const std::string item_name) |
| Replace "/" with "" in output name, to avoid confusing robot monitor. | |
| std::string | diagnostic_aggregator::removeLeadingNameChaff (const std::string &input_name, const std::string &chaff) |
| Removes redundant prefixes from status name. | |
| DiagnosticLevel | diagnostic_aggregator::valToLevel (const int val) |
| Converts in to DiagnosticLevel. Values: [0, 3]. | |
| std::string | diagnostic_aggregator::valToMsg (const int val) |
| Converts int to message {0: 'OK', 1: 'Warning', 2: 'Error', 3: 'Stale' }. | |

