#include <cstdlib>#include <limits>#include <iostream>#include "collision_checking/BVH_defs.h"#include "collision_checking/vec_3f.h"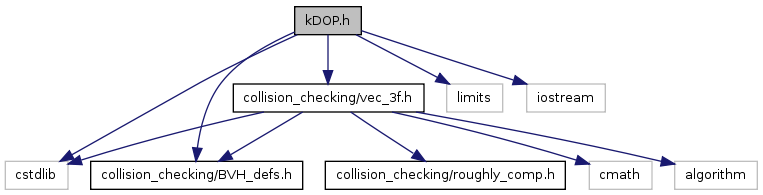

Go to the source code of this file.
Classes | |
| class | collision_checking::KDOP< N > |
| KDOP class describes the KDOP collision structures. K is set as the template parameter, which should be 16, 18, or 24 The KDOP structure is defined by some pairs of parallel planes defined by some axes. For K = 18, the planes are 6 AABB planes and 12 diagonal planes that cut off some space of the edges: (-1,0,0) and (1,0,0) -> indices 0 and 9 (0,-1,0) and (0,1,0) -> indices 1 and 10 (0,0,-1) and (0,0,1) -> indices 2 and 11 (-1,-1,0) and (1,1,0) -> indices 3 and 12 (-1,0,-1) and (1,0,1) -> indices 4 and 13 (0,-1,-1) and (0,1,1) -> indices 5 and 14 (-1,1,0) and (1,-1,0) -> indices 6 and 15 (-1,0,1) and (1,0,-1) -> indices 7 and 16 (0,-1,1) and (0,1,-1) -> indices 8 and 17. More... | |
Namespaces | |
| namespace | collision_checking |
Main namespace. | |
Functions | |
| template<size_t N> | |
| void | collision_checking::getDistances (const Vec3f &p, BVH_REAL d[]) |
| Compute the distances to planes with normals from KDOP vectors except those of AABB face planes. | |
| template<> | |
| void | collision_checking::getDistances< 5 > (const Vec3f &p, BVH_REAL d[]) |
| Specification of getDistances. | |
| template<> | |
| void | collision_checking::getDistances< 6 > (const Vec3f &p, BVH_REAL d[]) |
| template<> | |
| void | collision_checking::getDistances< 9 > (const Vec3f &p, BVH_REAL d[]) |
| void | collision_checking::minmax (BVH_REAL p, BVH_REAL &minv, BVH_REAL &maxv) |
| Merge the interval [minv, maxv] and value p. | |
| void | collision_checking::minmax (BVH_REAL a, BVH_REAL b, BVH_REAL &minv, BVH_REAL &maxv) |
| Find the smaller and larger one of two values. | |

