#include "collision_checking/collision_primitive.h"#include <iostream>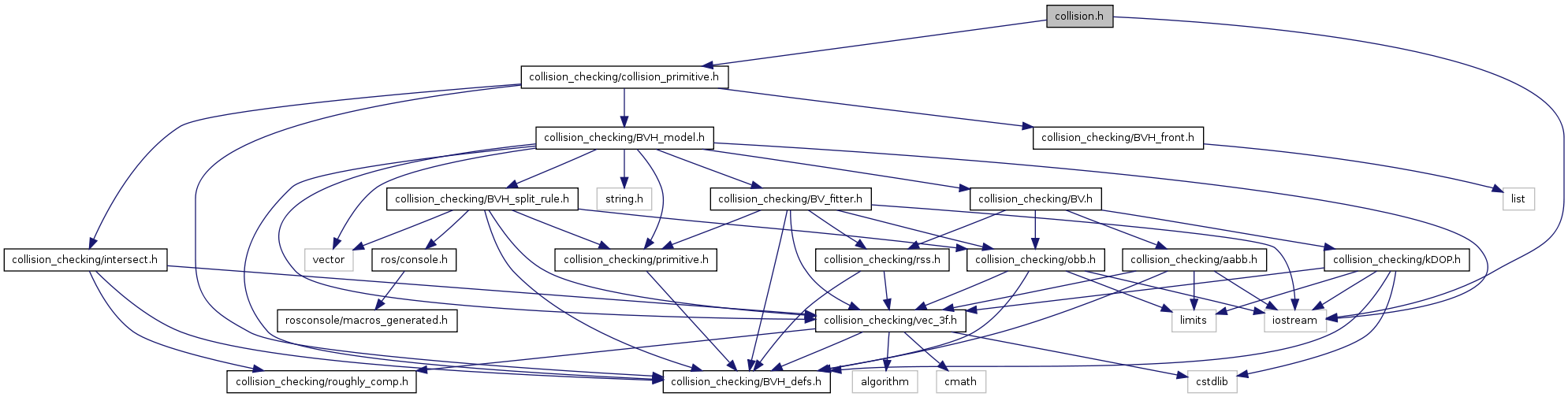
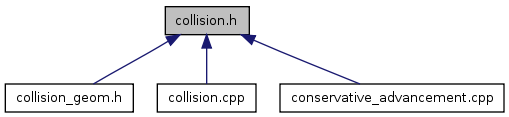
Go to the source code of this file.
Namespaces | |
| namespace | collision_checking |
Main namespace. | |
Functions | |
| int | collision_checking::collide (const BVHModel< RSS > &model1, const Vec3f R1[3], const Vec3f &T1, const BVHModel< RSS > &model2, const Vec3f R2[3], const Vec3f &T2, BVH_CollideResult *res, BVHFrontList *front_list=NULL) |
| Collision between two RSS models, only support mesh-mesh For RSS, we provide a specification that need not update the mesh vertices. | |
| int | collision_checking::collide (const BVHModel< OBB > &model1, const Vec3f R1[3], const Vec3f &T1, const BVHModel< OBB > &model2, const Vec3f R2[3], const Vec3f &T2, BVH_CollideResult *res, BVHFrontList *front_list=NULL) |
| Collision between two OBB models, only support mesh-mesh For OBB, we provide a specification that need not update the mesh vertices. | |
| template<typename BV > | |
| int | collision_checking::collide (const BVHModel< BV > &model1, const BVHModel< BV > &model2, BVH_CollideResult *res, BVHFrontList *front_list=NULL) |
| Collision between two BVH models, only support mesh-mesh. | |
| template<typename BV > | |
| int | collision_checking::selfCollide (const BVHModel< BV > &model, BVH_CollideResult *res, BVHFrontList *front_list=NULL) |
| Self collision for one BVH model, only support mesh. | |

