#include <ros/ros.h>#include <art/pid2.h>#include <art_msgs/Epsilon.h>#include "accel_example.h"#include <art_msgs/PilotState.h>#include <art_pilot/PilotConfig.h>#include "device_interface.h"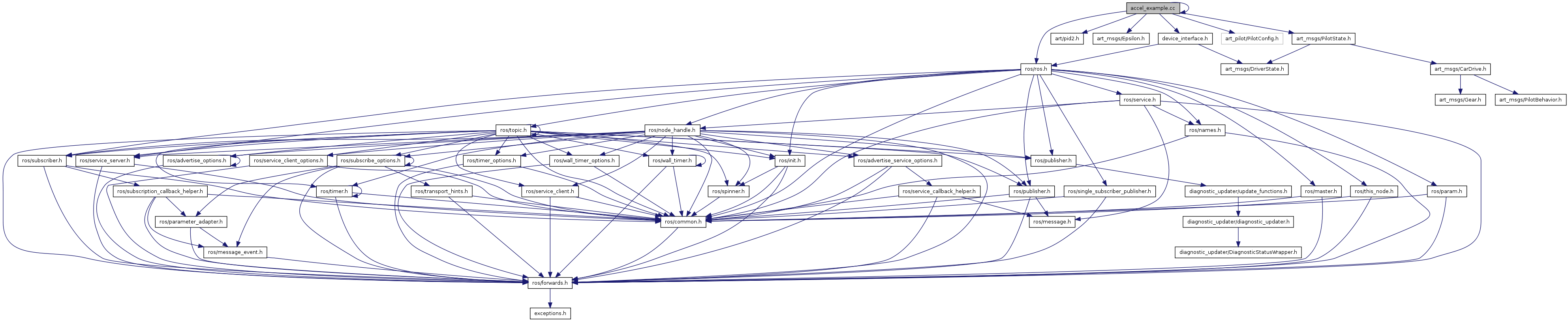

Go to the source code of this file.
Namespaces | |
| namespace | pilot |
ART pilot acceleration controller example.
This simple example just does brake and throttle PID control adjust speed to match the target goal velocity. It does not handle acceleration directly.
Definition in file accel_example.cc.

