#include "eigenGrasp.h"#include "robot.h"#include <math.h>#include <stdio.h>#include <QFile>#include <QString>#include <QTextStream>#include "math/matrix.h"#include <assert.h>#include <iostream>#include <vector>#include <list>#include <map>#include <memory>#include <cstdio>#include "debug.h"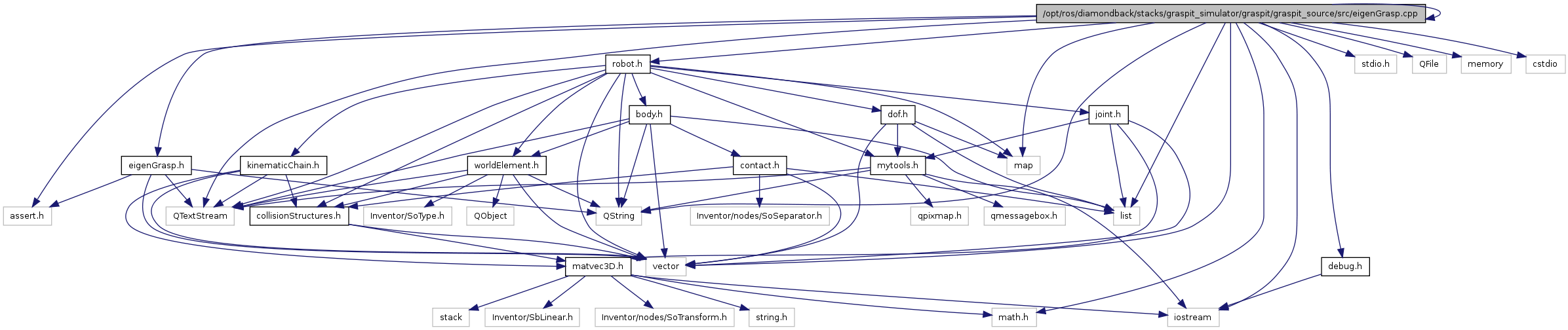

Go to the source code of this file.

