Include dependency graph for spatial/classic-acceleration.hpp:
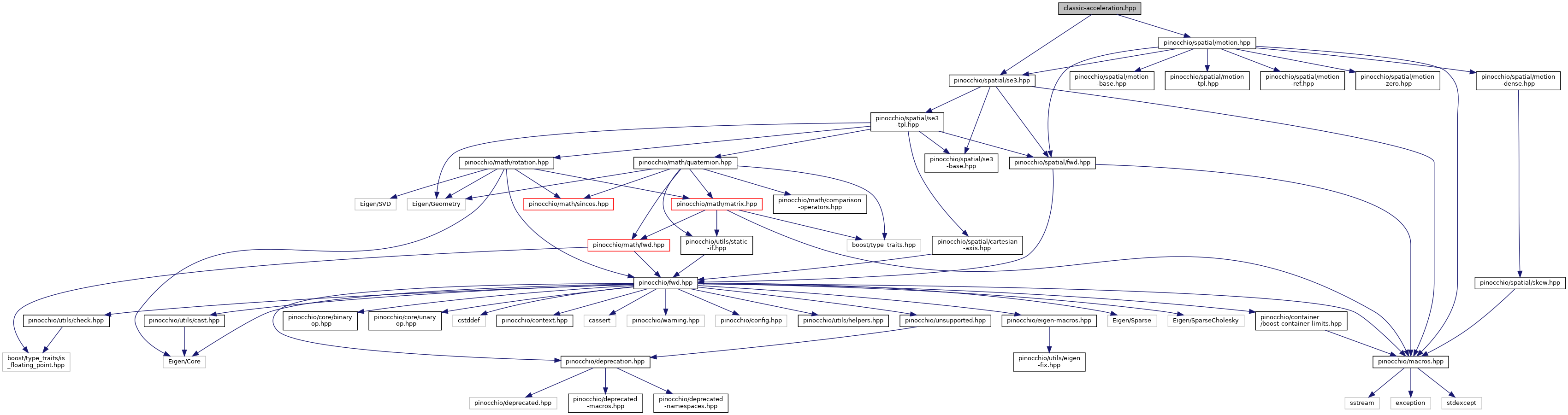
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Motion1 , typename Motion2 , typename Vector3Like > | |
| void | pinocchio::classicAcceleration (const MotionDense< Motion1 > &spatial_velocity, const MotionDense< Motion2 > &spatial_acceleration, const Eigen::MatrixBase< Vector3Like > &res) |
| Computes the classic acceleration from a given spatial velocity and spatial acceleration. More... | |
| template<typename Motion1 , typename Motion2 , typename SE3Scalar , int SE3Options, typename Vector3Like > | |
| void | pinocchio::classicAcceleration (const MotionDense< Motion1 > &spatial_velocity, const MotionDense< Motion2 > &spatial_acceleration, const SE3Tpl< SE3Scalar, SE3Options > &placement, const Eigen::MatrixBase< Vector3Like > &res) |
| Computes the classic acceleration of a given frame B knowing the spatial velocity and spatial acceleration of a frame A and the relative placement between these two frames. More... | |
| pinocchio::classicAcceleration (spatial_velocity, spatial_acceleration, placement, res) | |
| pinocchio::classicAcceleration (spatial_velocity, spatial_acceleration, res) | |
| template<typename Motion1 , typename Motion2 > | |
| pinocchio::PINOCCHIO_EIGEN_PLAIN_TYPE (typename Motion2::Vector3) classicAcceleration(const MotionDense< Motion1 > &spatial_velocity | |
| Computes the classic acceleration from a given spatial velocity and spatial acceleration. More... | |
| template<typename Motion1 , typename Motion2 , typename SE3Scalar , int SE3Options> | |
| pinocchio::PINOCCHIO_EIGEN_PLAIN_TYPE (typename Motion2::Vector3) classicAcceleration(const MotionDense< Motion1 > &spatial_velocity | |
| Computes the classic acceleration of a given frame B knowing the spatial velocity and spatial acceleration of a frame A and the relative placement between these two frames. More... | |
Variables | |
| const MotionDense< Motion2 > const SE3Tpl< SE3Scalar, SE3Options > & | pinocchio::placement |
| ReturnType | pinocchio::res |
| const MotionDense< Motion2 > & | pinocchio::spatial_acceleration |