#include "pinocchio/algorithm/contact-info.hpp"#include "pinocchio/algorithm/impulse-dynamics-derivatives.hxx"
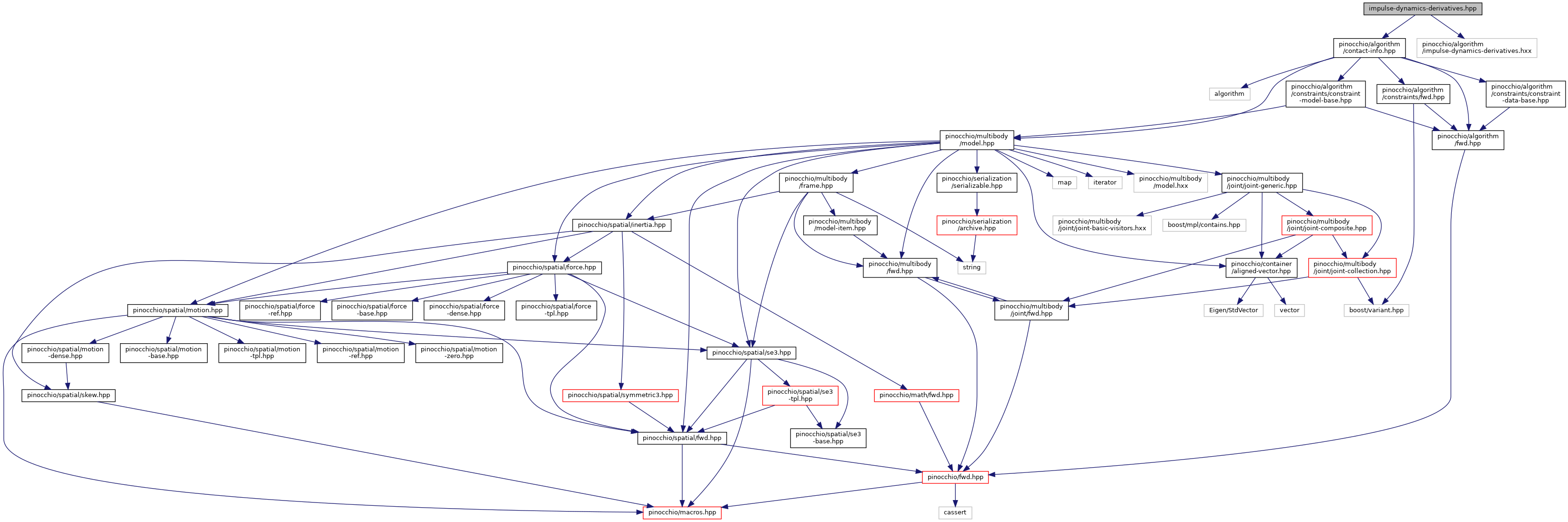
Include dependency graph for impulse-dynamics-derivatives.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, class ConstraintModelAllocator , class ConstraintDataAllocator > | |
| void | pinocchio::computeImpulseDynamicsDerivatives (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const std::vector< RigidConstraintModelTpl< Scalar, Options >, ConstraintModelAllocator > &contact_models, std::vector< RigidConstraintDataTpl< Scalar, Options >, ConstraintDataAllocator > &contact_data, const Scalar r_coeff, const ProximalSettingsTpl< Scalar > &settings) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, class ConstraintModelAllocator , class ConstraintDataAllocator , typename MatrixType1 , typename MatrixType2 , typename MatrixType3 , typename MatrixType4 > | |
| void | pinocchio::computeImpulseDynamicsDerivatives (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const std::vector< RigidConstraintModelTpl< Scalar, Options >, ConstraintModelAllocator > &contact_models, std::vector< RigidConstraintDataTpl< Scalar, Options >, ConstraintDataAllocator > &contact_data, const Scalar r_coeff, const ProximalSettingsTpl< Scalar > &settings, const Eigen::MatrixBase< MatrixType1 > &dvimpulse_partial_dq, const Eigen::MatrixBase< MatrixType2 > &dvimpulse_partial_dv, const Eigen::MatrixBase< MatrixType3 > &impulse_partial_dq, const Eigen::MatrixBase< MatrixType4 > &impulse_partial_dv) |