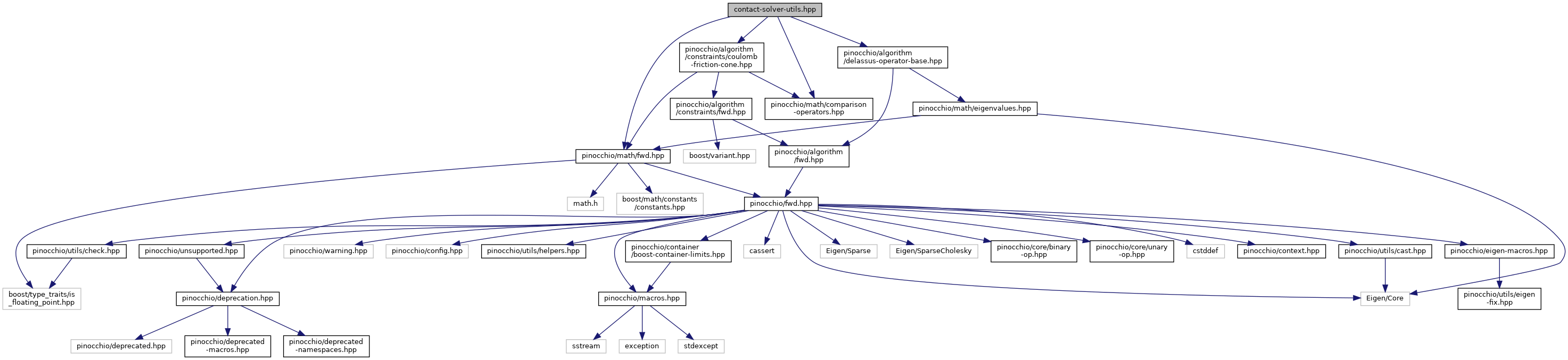
#include "pinocchio/math/fwd.hpp"#include "pinocchio/math/comparison-operators.hpp"#include "pinocchio/algorithm/constraints/coulomb-friction-cone.hpp"#include "pinocchio/algorithm/delassus-operator-base.hpp"
Include dependency graph for contact-solver-utils.hpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::internal | |
Functions | |
| template<typename Scalar , typename ConstraintAllocator , typename VectorLikeIn , typename VectorLikeOut > | |
| void | pinocchio::internal::computeComplementarityShift (const std::vector< CoulombFrictionConeTpl< Scalar >, ConstraintAllocator > &cones, const Eigen::DenseBase< VectorLikeIn > &velocities, const Eigen::DenseBase< VectorLikeOut > &shift_) |
| template<typename Scalar , typename ConstraintAllocator , typename VectorLikeIn , typename VectorLikeOut > | |
| void | pinocchio::internal::computeConeProjection (const std::vector< CoulombFrictionConeTpl< Scalar >, ConstraintAllocator > &cones, const Eigen::DenseBase< VectorLikeIn > &x, const Eigen::DenseBase< VectorLikeOut > &x_proj_) |
| Project a vector x on the vector of cones. More... | |
| template<typename Scalar , typename ConstraintAllocator , typename VectorLikeVelocity , typename VectorLikeForce > | |
| Scalar | pinocchio::internal::computeConicComplementarity (const std::vector< CoulombFrictionConeTpl< Scalar >, ConstraintAllocator > &cones, const Eigen::DenseBase< VectorLikeVelocity > &velocities, const Eigen::DenseBase< VectorLikeForce > &forces) |
| template<typename Scalar , typename ConstraintAllocator , typename VectorLikeIn , typename VectorLikeOut > | |
| void | pinocchio::internal::computeDualConeProjection (const std::vector< CoulombFrictionConeTpl< Scalar >, ConstraintAllocator > &cones, const Eigen::DenseBase< VectorLikeIn > &x, const Eigen::DenseBase< VectorLikeOut > &x_proj_) |
| Project a vector x on the dual of the cones contained in the vector of cones. More... | |
| template<typename Scalar , typename ConstraintAllocator , typename VectorLikeIn > | |
| Scalar | pinocchio::internal::computePrimalFeasibility (const std::vector< CoulombFrictionConeTpl< Scalar >, ConstraintAllocator > &cones, const Eigen::DenseBase< VectorLikeIn > &forces) |
| template<typename Scalar , typename ConstraintAllocator , typename ForceVector , typename VelocityVector > | |
| Scalar | pinocchio::internal::computeReprojectionError (const std::vector< CoulombFrictionConeTpl< Scalar >, ConstraintAllocator > &cones, const Eigen::DenseBase< ForceVector > &forces, const Eigen::DenseBase< VelocityVector > &velocities) |