Equivalent inertial navigation factor (velocity in the global frame), without bias state. More...
#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam/linear/NoiseModel.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/base/Matrix.h>#include <gtsam/base/numericalDerivative.h>#include <ostream>
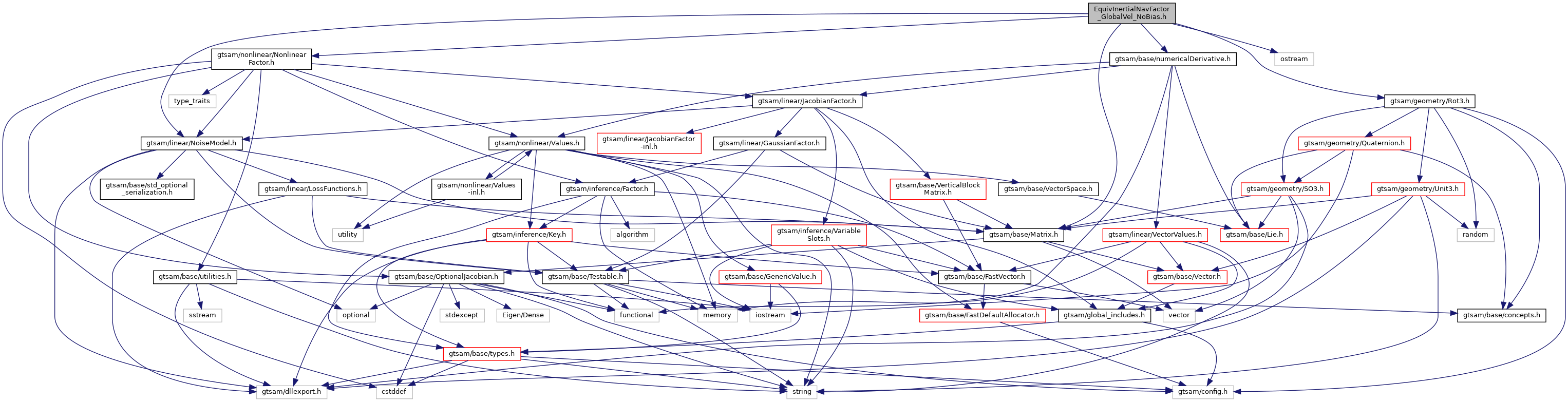
Include dependency graph for EquivInertialNavFactor_GlobalVel_NoBias.h:
Go to the source code of this file.
Classes | |
| class | gtsam::EquivInertialNavFactor_GlobalVel_NoBias< POSE, VELOCITY > |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
Equivalent inertial navigation factor (velocity in the global frame), without bias state.
- Date
- May 9, 2013
Definition in file EquivInertialNavFactor_GlobalVel_NoBias.h.