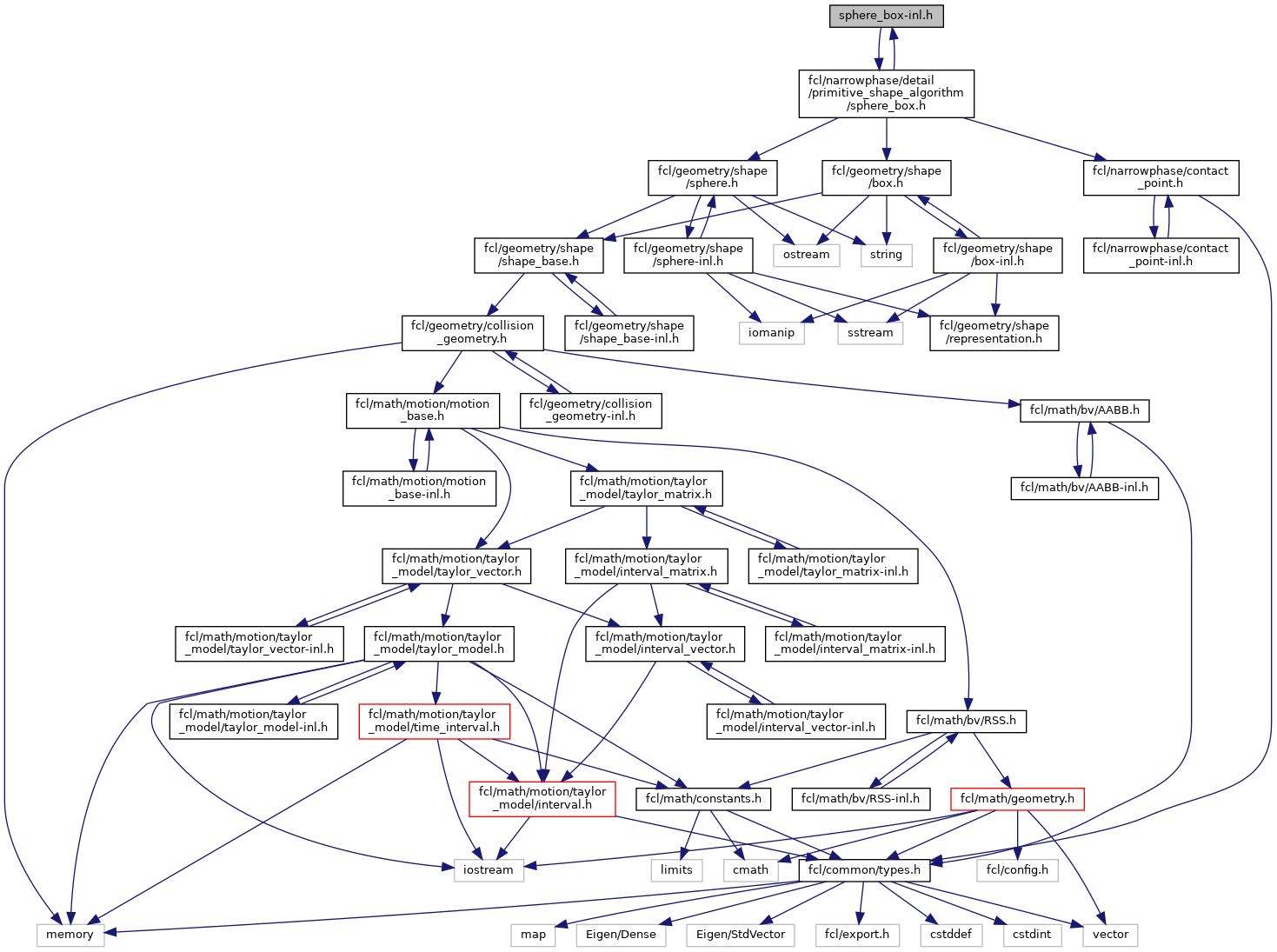
Include dependency graph for sphere_box-inl.h:
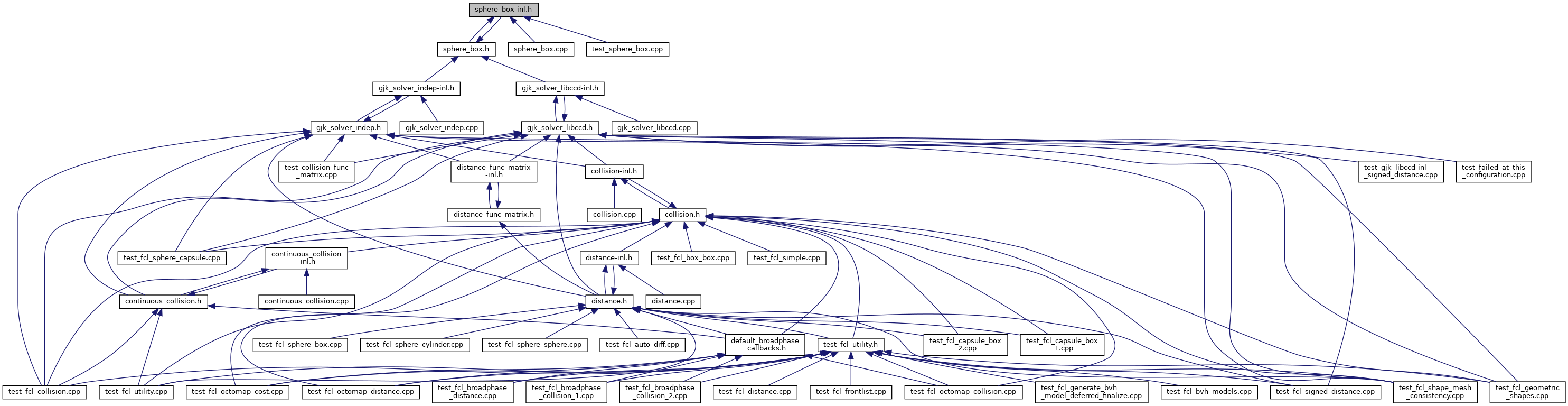
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| fcl | |
| Main namespace. | |
| fcl::detail | |
Functions | |
| template<typename S > | |
| bool | fcl::detail::nearestPointInBox (const Vector3< S > &size, const Vector3< S > &p_BQ, Vector3< S > *p_BN_ptr) |
| template FCL_EXPORT bool | fcl::detail::sphereBoxDistance (const Sphere< double > &sphere, const Transform3< double > &X_FS, const Box< double > &box, const Transform3< double > &X_FB, double *distance, Vector3< double > *p_FSb, Vector3< double > *p_FBs) |
| template FCL_EXPORT bool | fcl::detail::sphereBoxIntersect (const Sphere< double > &sphere, const Transform3< double > &X_FS, const Box< double > &box, const Transform3< double > &X_FB, std::vector< ContactPoint< double >> *contacts) |