#include "collisionModel.h"#include <algorithm>#include "debug.h"#include "lapack_wrappers.h"#include "collisionStructures.h"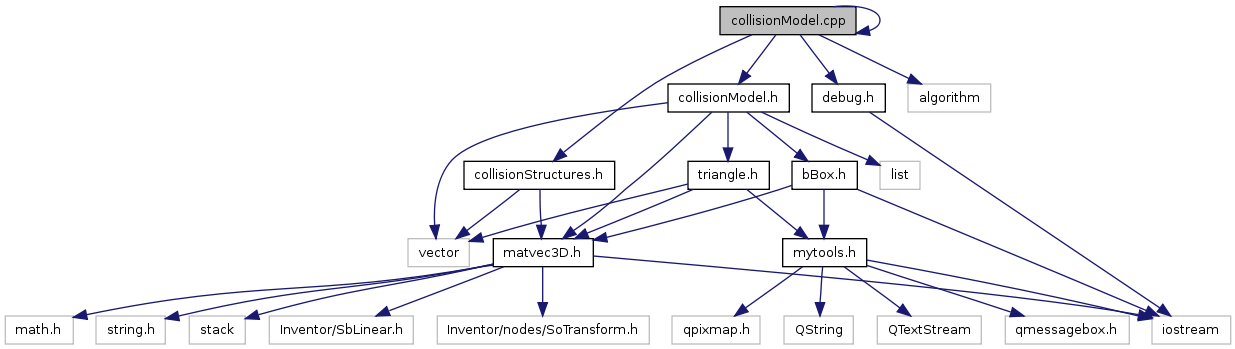
Go to the source code of this file.
Namespaces | |
| namespace | Collision |
Functions | |
| void | Collision::boxSize (const position &p, vec3 &min, vec3 &max, const vec3 &x, const vec3 &y, const vec3 &z, double tolerance) |
| bool | Collision::compareProjections (const std::pair< Triangle, double > &p1, const std::pair< Triangle, double > &p2) |
| void | Collision::copy (double r[3][3], const double o[3][3]) |
| void | Collision::Jacobi (double a[3][3], double v[3][3]) |
| void | Collision::multiply (double r[3][3], const double a[3][3], const double b[3][3]) |
| void | Collision::print (const double a[3][3]) |
| void | Collision::SymSchur2 (double a[3][3], int p, int q, double &c, double &s) |
| void | Collision::transpose (double r[3][3], const double o[3][3]) |

