#include "collision_checking/distance_primitive.h"#include "collision_checking/intersect.h"#include <limits>#include <queue>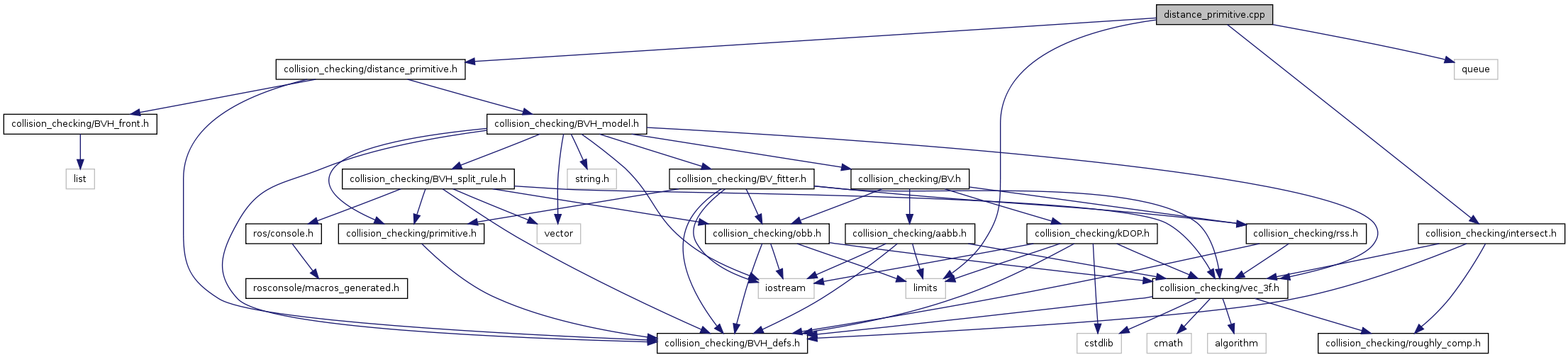
Go to the source code of this file.
Classes | |
| struct | collision_checking::BVT |
| Bounding volume test structure. More... | |
| struct | collision_checking::BVT_Comparer |
| Comparer between two BVT. More... | |
Namespaces | |
| namespace | collision_checking |
Main namespace. | |
Typedefs | |
| typedef std::priority_queue < BVT, std::vector< BVT > , BVT_Comparer > | collision_checking::BVTQ |
Functions | |
| void | collision_checking::distanceQueueRecurse (BVNode< RSS > *tree1, BVNode< RSS > *tree2, const Vec3f R[3], const Vec3f &T, int b1, int b2, Vec3f *vertices1, Vec3f *vertices2, Triangle *tri_indices1, Triangle *tri_indices2, BVH_DistanceResult *res, BVHFrontList *front_list=NULL) |
| Recursive proximity kernel between two RSS trees, using BVT queue acceleration. | |
| void | collision_checking::distanceRecurse (BVNode< RSS > *tree1, BVNode< RSS > *tree2, const Vec3f R[3], const Vec3f &T, int b1, int b2, Vec3f *vertices1, Vec3f *vertices2, Triangle *tri_indices1, Triangle *tri_indices2, BVH_DistanceResult *res, BVHFrontList *front_list=NULL) |
| Recursive proximity kernel between two RSS trees. | |

