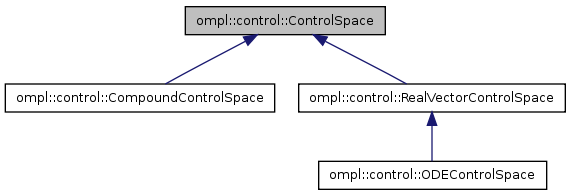
A control space representing the space of applicable controls. More...
#include <ControlSpace.h>
Public Member Functions | |
| virtual Control * | allocControl (void) const =0 |
| Allocate memory for a control. | |
| virtual ControlSamplerPtr | allocControlSampler (void) const =0 |
| Allocate a control sampler. | |
| template<class T > | |
| const T * | as (void) const |
| Cast this instance to a desired type. | |
| template<class T > | |
| T * | as (void) |
| Cast this instance to a desired type. | |
| virtual bool | canPropagateBackward (void) const |
| Some systems can only propagate forward in time (i.e., the duration argument for the propagate() function is always positive). If this is the case, this function should return false. Planners that need backward propagation (negative durations) will call this function to check. If backward propagation is possible, this function should return true (this is the default). | |
| ControlSpace (const base::StateSpacePtr &stateSpace) | |
| Construct a control space, given the state space. | |
| virtual void | copyControl (Control *destination, const Control *source) const =0 |
| Copy a control to another. | |
| virtual bool | equalControls (const Control *control1, const Control *control2) const =0 |
| Check if two controls are the same. | |
| virtual void | freeControl (Control *control) const =0 |
| Free the memory of a control. | |
| virtual unsigned int | getDimension (void) const =0 |
| Get the dimension of this control space. | |
| const std::string & | getName (void) const |
| Get the name of the control space. | |
| const base::StateSpacePtr & | getStateSpace (void) const |
| Return the state space this control space depends on. | |
| virtual double * | getValueAddressAtIndex (Control *control, const unsigned int index) const |
| Many controls contain a number of double values. This function provides a means to get the memory address of a double value from a control control located at position index. The first double value is returned for index = 0. If index is too large (does not point to any double values in the control), the return value is NULL. | |
| virtual void | nullControl (Control *control) const =0 |
| Make the control have no effect if it were to be applied to a state for any amount of time. | |
| virtual void | printControl (const Control *control, std::ostream &out) const |
| Print a control to a stream. | |
| virtual void | printSettings (std::ostream &out) const |
| Print the settings for this control space to a stream. | |
| virtual void | propagate (const base::State *state, const Control *control, const double duration, base::State *result) const |
| Propagate from a state, given a control, for some specified amount of time (the amount of time can also be negative, if canPropagateBackward() returns true). | |
| void | setName (const std::string &name) |
| Set the name of the control space. | |
| void | setPropagationFunction (const StatePropagationFn &fn) |
| Set the function that performs state propagation. | |
| virtual void | setup (void) |
| Perform final setup steps. This function is automatically called by the SpaceInformation. | |
| virtual | ~ControlSpace (void) |
Protected Attributes | |
| StatePropagationFn | statePropagation_ |
| Function that can perform state propagation. | |
| base::StateSpacePtr | stateSpace_ |
| The state space controls can be applied to. | |
Private Attributes | |
| std::string | name_ |
| The name of this control space. | |
A control space representing the space of applicable controls.
Definition at line 67 of file ControlSpace.h.
| ompl::control::ControlSpace::ControlSpace | ( | const base::StateSpacePtr & | stateSpace | ) |
Construct a control space, given the state space.
| virtual ompl::control::ControlSpace::~ControlSpace | ( | void | ) | [virtual] |
| virtual Control* ompl::control::ControlSpace::allocControl | ( | void | ) | const [pure virtual] |
Allocate memory for a control.
Implemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| virtual ControlSamplerPtr ompl::control::ControlSpace::allocControlSampler | ( | void | ) | const [pure virtual] |
Allocate a control sampler.
Implemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| const T* ompl::control::ControlSpace::as | ( | void | ) | const [inline] |
Cast this instance to a desired type.
Make sure the type we are casting to is indeed a control space
Definition at line 88 of file ControlSpace.h.
| T* ompl::control::ControlSpace::as | ( | void | ) | [inline] |
Cast this instance to a desired type.
Make sure the type we are casting to is indeed a control space
Definition at line 78 of file ControlSpace.h.
| virtual bool ompl::control::ControlSpace::canPropagateBackward | ( | void | ) | const [virtual] |
Some systems can only propagate forward in time (i.e., the duration argument for the propagate() function is always positive). If this is the case, this function should return false. Planners that need backward propagation (negative durations) will call this function to check. If backward propagation is possible, this function should return true (this is the default).
Reimplemented in ompl::control::CompoundControlSpace, and ompl::control::ODEControlSpace.
| virtual void ompl::control::ControlSpace::copyControl | ( | Control * | destination, | |
| const Control * | source | |||
| ) | const [pure virtual] |
Copy a control to another.
Implemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| virtual bool ompl::control::ControlSpace::equalControls | ( | const Control * | control1, | |
| const Control * | control2 | |||
| ) | const [pure virtual] |
Check if two controls are the same.
Implemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| virtual void ompl::control::ControlSpace::freeControl | ( | Control * | control | ) | const [pure virtual] |
Free the memory of a control.
Implemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| virtual unsigned int ompl::control::ControlSpace::getDimension | ( | void | ) | const [pure virtual] |
Get the dimension of this control space.
Implemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| const std::string& ompl::control::ControlSpace::getName | ( | void | ) | const |
Get the name of the control space.
| const base::StateSpacePtr& ompl::control::ControlSpace::getStateSpace | ( | void | ) | const [inline] |
Return the state space this control space depends on.
Definition at line 103 of file ControlSpace.h.
| virtual double* ompl::control::ControlSpace::getValueAddressAtIndex | ( | Control * | control, | |
| const unsigned int | index | |||
| ) | const [virtual] |
Many controls contain a number of double values. This function provides a means to get the memory address of a double value from a control control located at position index. The first double value is returned for index = 0. If index is too large (does not point to any double values in the control), the return value is NULL.
Reimplemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| virtual void ompl::control::ControlSpace::nullControl | ( | Control * | control | ) | const [pure virtual] |
Make the control have no effect if it were to be applied to a state for any amount of time.
Implemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| virtual void ompl::control::ControlSpace::printControl | ( | const Control * | control, | |
| std::ostream & | out | |||
| ) | const [virtual] |
Print a control to a stream.
Reimplemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| virtual void ompl::control::ControlSpace::printSettings | ( | std::ostream & | out | ) | const [virtual] |
Print the settings for this control space to a stream.
Reimplemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
| virtual void ompl::control::ControlSpace::propagate | ( | const base::State * | state, | |
| const Control * | control, | |||
| const double | duration, | |||
| base::State * | result | |||
| ) | const [virtual] |
Propagate from a state, given a control, for some specified amount of time (the amount of time can also be negative, if canPropagateBackward() returns true).
| state | the state to start propagating from | |
| control | the control to apply | |
| duration | the duration for which the control is applied | |
| result | the state the system is brought to |
Reimplemented in ompl::control::CompoundControlSpace, and ompl::control::ODEControlSpace.
| void ompl::control::ControlSpace::setName | ( | const std::string & | name | ) |
Set the name of the control space.
| void ompl::control::ControlSpace::setPropagationFunction | ( | const StatePropagationFn & | fn | ) |
Set the function that performs state propagation.
| virtual void ompl::control::ControlSpace::setup | ( | void | ) | [virtual] |
Perform final setup steps. This function is automatically called by the SpaceInformation.
Reimplemented in ompl::control::CompoundControlSpace, and ompl::control::RealVectorControlSpace.
std::string ompl::control::ControlSpace::name_ [private] |
The name of this control space.
Definition at line 181 of file ControlSpace.h.
Function that can perform state propagation.
Definition at line 176 of file ControlSpace.h.
The state space controls can be applied to.
Definition at line 173 of file ControlSpace.h.

