#include "ompl/base/SpaceInformation.h"#include <boost/concept_check.hpp>#include <iostream>
Go to the source code of this file.
Classes | |
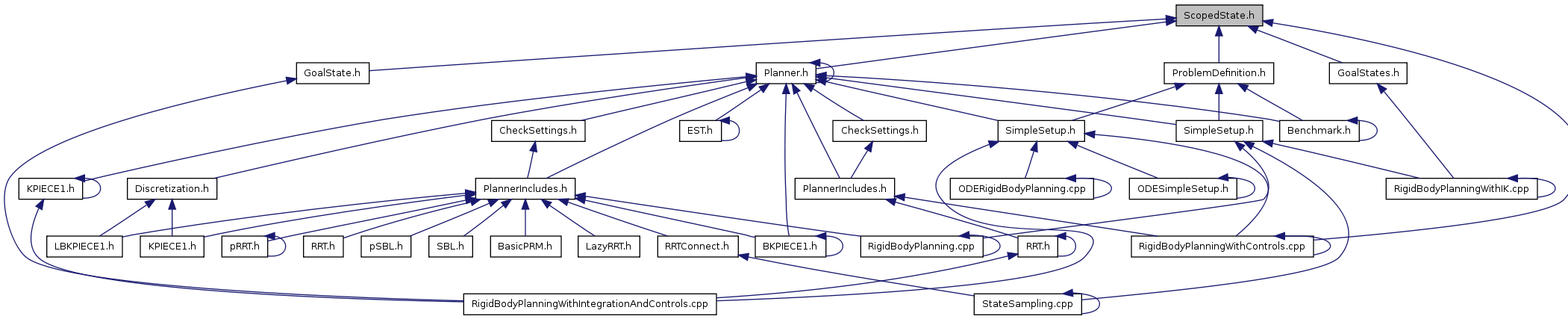
| class | ompl::base::ScopedState< T > |
| Definition of a scoped state. More... | |
Namespaces | |
| namespace | ompl |
Main namespace. Contains everything in this library. | |
| namespace | ompl::base |
This namespace contains sampling based planning routines shared by both planning under geometric constraints (geometric) and planning under differential constraints (dynamic). | |
Typedefs | |
| typedef boost::shared_ptr < ScopedState<> > | ompl::base::ScopedStatePtr |
| Shared pointer to a ScopedState<> | |
Functions | |
| template<class T , class Y > | |
| ScopedState< T > & | ompl::base::operator<< (ScopedState< T > &to, const ScopedState< Y > &from) |
| This is a fancy version of the assignment operator. It is a partial assignment, in some sense. The difference is that if the states are part of compound state spaces, the data is copied from from to to on a component by component basis. State spaces are matched by name. If the state space for to contains any subspace whose name matches any subspace of the state space for from, the corresponding state components are copied. | |
| template<class T > | |
| std::ostream & | ompl::base::operator<< (std::ostream &out, const ScopedState< T > &state) |
| Overload stream output operator. Calls ompl::base::StateSpace::printState(). | |
| template<class T , class Y > | |
| const ScopedState< T > & | ompl::base::operator>> (const ScopedState< T > &from, ScopedState< Y > &to) |
| This is a fancy version of the assignment operator. It is a partial assignment, in some sense. The difference is that if the states are part of compound state spaces, the data is copied from from to to on a component by component basis. State spaces are matched by name. If the state space for to contains any subspace whose name matches any subspace of the state space for from, the corresponding state components are copied. | |
| template<class T , class Y > | |
| ScopedState | ompl::base::operator^ (const ScopedState< T > &a, const ScopedState< Y > &b) |
| Given state a from state space A and state b from state space B, construct a state from state space A + B. The resulting state contains all the information from the input states (the states are concatenated). | |

