#include <cvd/image.h>#include <cvd/internal/is_pod.h>#include <cvd/internal/pixel_traits.h>#include <cvd/internal/convert_pixel_types.h>#include <sys/types.h>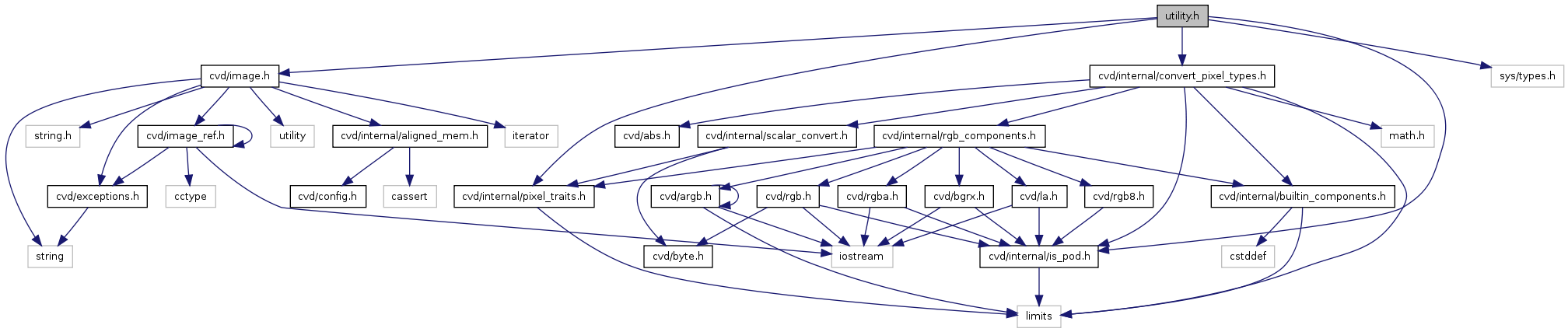
Go to the source code of this file.
Classes | |
| struct | CVD::SumSquaredDifferences< R, D, T > |
| struct | CVD::ZeroPixel< T, pod > |
| struct | CVD::ZeroPixel< T, true > |
| struct | CVD::ZeroPixels< T, pod > |
| struct | CVD::ZeroPixels< T, true > |
Namespaces | |
| namespace | CVD |
Functions | |
| void | CVD::add_multiple_of_sum (const double *a, const double *b, const double &c, double *out, size_t count) |
| void | CVD::add_multiple_of_sum (const float *a, const float *b, const float &c, float *out, size_t count) |
| template<class A , class B , class C > | |
| void | CVD::add_multiple_of_sum (const A *a, const A *b, const C &c, B *out, size_t count) |
| void | CVD::assign_multiple (const double *a, const double &c, double *out, size_t count) |
| void | CVD::assign_multiple (const float *a, const float &c, float *out, size_t count) |
| template<class A , class B , class C > | |
| void | CVD::assign_multiple (const A *a, const B &c, C *out, size_t count) |
| template<class S , class T > | |
| void | CVD::copy (const BasicImage< S > &in, BasicImage< T > &out, ImageRef size=ImageRef(-1,-1), ImageRef begin=ImageRef(), ImageRef dst=ImageRef()) |
| void | CVD::differences (const double *a, const double *b, double *diff, size_t size) |
| void | CVD::differences (const int32_t *a, const int32_t *b, int32_t *diff, size_t size) |
| void | CVD::differences (const float *a, const float *b, float *diff, size_t size) |
| void | CVD::differences (const short *a, const short *b, short *diff, unsigned int size) |
| void | CVD::differences (const byte *a, const byte *b, short *diff, unsigned int size) |
| template<class A , class B > | |
| void | CVD::differences (const A *a, const A *b, B *diff, size_t count) |
| template<class T > | |
| void | CVD::fillBorders (SubImage< T > &im, const T pix, int w=1) |
| double | CVD::inner_product (const double *a, const double *b, size_t count) |
| double | CVD::inner_product (const float *a, const float *b, size_t count) |
| template<class T > | |
| double | CVD::inner_product (const T *a, const T *b, size_t count) |
| template<int bytes> | |
| bool | CVD::is_aligned (const void *ptr) |
| Check if the pointer is aligned to the specified byte granularity. | |
| template<> | |
| bool | CVD::is_aligned< 16 > (const void *ptr) |
| template<> | |
| bool | CVD::is_aligned< 8 > (const void *ptr) |
| void | CVD::square (const float *in, float *out, size_t count) |
| template<class T1 , class T2 > | |
| void | CVD::square (const T1 *in, T2 *out, size_t count) |
| template<int A, class T > | |
| size_t | CVD::steps_to_align (const T *ptr) |
| Compute the number of pointer increments necessary to yield alignment of A bytes. | |
| void | CVD::subtract_square (const float *in, float *out, size_t count) |
| template<class T1 , class T2 > | |
| void | CVD::subtract_square (const T1 *in, T2 *out, size_t count) |
| long long | CVD::sum_squared_differences (const byte *a, const byte *b, size_t count) |
| double | CVD::sum_squared_differences (const double *a, const double *b, size_t count) |
| double | CVD::sum_squared_differences (const float *a, const float *b, size_t count) |
| template<class T > | |
| double | CVD::sum_squared_differences (const T *a, const T *b, size_t count) |
| template<class T > | |
| void | CVD::zeroBorders (BasicImage< T > &I) |
| Set the one-pixel border (top, bottom, sides) of an image to zero values. | |
| template<class T > | |
| void | CVD::zeroPixel (T &pixel) |
| template<class T > | |
| void | CVD::zeroPixels (T *pixels, int count) |

