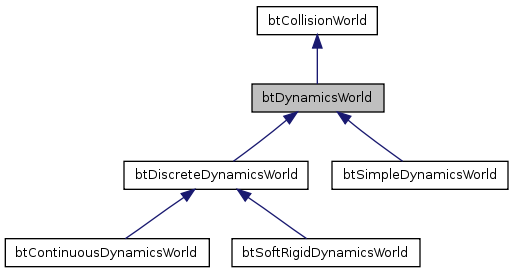
The btDynamicsWorld is the interface class for several dynamics implementation, basic, discrete, parallel, and continuous etc. More...
#include <btDynamicsWorld.h>
Public Member Functions | |
| virtual void | addAction (btActionInterface *action)=0 |
| virtual void | addCharacter (btActionInterface *character) |
| obsolete, use addAction instead. | |
| virtual void | addConstraint (btTypedConstraint *constraint, bool disableCollisionsBetweenLinkedBodies=false) |
| virtual void | addRigidBody (btRigidBody *body)=0 |
| virtual void | addVehicle (btActionInterface *vehicle) |
| obsolete, use addAction instead. | |
| btDynamicsWorld (btDispatcher *dispatcher, btBroadphaseInterface *broadphase, btCollisionConfiguration *collisionConfiguration) | |
| virtual void | clearForces ()=0 |
| virtual void | debugDrawWorld ()=0 |
| virtual const btTypedConstraint * | getConstraint (int index) const |
| virtual btTypedConstraint * | getConstraint (int index) |
| virtual btConstraintSolver * | getConstraintSolver ()=0 |
| virtual btVector3 | getGravity () const =0 |
| virtual int | getNumConstraints () const |
| btContactSolverInfo & | getSolverInfo () |
| virtual btDynamicsWorldType | getWorldType () const =0 |
| void * | getWorldUserInfo () const |
| virtual void | removeAction (btActionInterface *action)=0 |
| virtual void | removeCharacter (btActionInterface *character) |
| obsolete, use removeAction instead | |
| virtual void | removeConstraint (btTypedConstraint *constraint) |
| virtual void | removeRigidBody (btRigidBody *body)=0 |
| virtual void | removeVehicle (btActionInterface *vehicle) |
| obsolete, use removeAction instead | |
| virtual void | setConstraintSolver (btConstraintSolver *solver)=0 |
| virtual void | setGravity (const btVector3 &gravity)=0 |
| void | setInternalTickCallback (btInternalTickCallback cb, void *worldUserInfo=0, bool isPreTick=false) |
| Set the callback for when an internal tick (simulation substep) happens, optional user info. | |
| void | setWorldUserInfo (void *worldUserInfo) |
| virtual int | stepSimulation (btScalar timeStep, int maxSubSteps=1, btScalar fixedTimeStep=btScalar(1.)/btScalar(60.))=0 |
| virtual void | synchronizeMotionStates ()=0 |
| virtual | ~btDynamicsWorld () |
Protected Attributes | |
| btInternalTickCallback | m_internalPreTickCallback |
| btInternalTickCallback | m_internalTickCallback |
| btContactSolverInfo | m_solverInfo |
| void * | m_worldUserInfo |
The btDynamicsWorld is the interface class for several dynamics implementation, basic, discrete, parallel, and continuous etc.
Definition at line 39 of file btDynamicsWorld.h.
| btDynamicsWorld::btDynamicsWorld | ( | btDispatcher * | dispatcher, | |
| btBroadphaseInterface * | broadphase, | |||
| btCollisionConfiguration * | collisionConfiguration | |||
| ) | [inline] |
Definition at line 52 of file btDynamicsWorld.h.
| virtual btDynamicsWorld::~btDynamicsWorld | ( | ) | [inline, virtual] |
Definition at line 57 of file btDynamicsWorld.h.
| virtual void btDynamicsWorld::addAction | ( | btActionInterface * | action | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld.
| virtual void btDynamicsWorld::addCharacter | ( | btActionInterface * | character | ) | [inline, virtual] |
obsolete, use addAction instead.
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 139 of file btDynamicsWorld.h.
| virtual void btDynamicsWorld::addConstraint | ( | btTypedConstraint * | constraint, | |
| bool | disableCollisionsBetweenLinkedBodies = false | |||
| ) | [inline, virtual] |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 69 of file btDynamicsWorld.h.
| virtual void btDynamicsWorld::addRigidBody | ( | btRigidBody * | body | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| virtual void btDynamicsWorld::addVehicle | ( | btActionInterface * | vehicle | ) | [inline, virtual] |
obsolete, use addAction instead.
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 135 of file btDynamicsWorld.h.
| virtual void btDynamicsWorld::clearForces | ( | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| virtual void btDynamicsWorld::debugDrawWorld | ( | ) | [pure virtual] |
Reimplemented from btCollisionWorld.
Implemented in btDiscreteDynamicsWorld, and btSoftRigidDynamicsWorld.
| virtual const btTypedConstraint* btDynamicsWorld::getConstraint | ( | int | index | ) | const [inline, virtual] |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 99 of file btDynamicsWorld.h.
| virtual btTypedConstraint* btDynamicsWorld::getConstraint | ( | int | index | ) | [inline, virtual] |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 97 of file btDynamicsWorld.h.
| virtual btConstraintSolver* btDynamicsWorld::getConstraintSolver | ( | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| virtual btVector3 btDynamicsWorld::getGravity | ( | ) | const [pure virtual] |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| virtual int btDynamicsWorld::getNumConstraints | ( | ) | const [inline, virtual] |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 95 of file btDynamicsWorld.h.
| btContactSolverInfo& btDynamicsWorld::getSolverInfo | ( | ) | [inline] |
Definition at line 128 of file btDynamicsWorld.h.
| virtual btDynamicsWorldType btDynamicsWorld::getWorldType | ( | ) | const [pure virtual] |
Implemented in btContinuousDynamicsWorld, btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| void* btDynamicsWorld::getWorldUserInfo | ( | ) | const [inline] |
Definition at line 123 of file btDynamicsWorld.h.
| virtual void btDynamicsWorld::removeAction | ( | btActionInterface * | action | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld.
| virtual void btDynamicsWorld::removeCharacter | ( | btActionInterface * | character | ) | [inline, virtual] |
obsolete, use removeAction instead
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 141 of file btDynamicsWorld.h.
| virtual void btDynamicsWorld::removeConstraint | ( | btTypedConstraint * | constraint | ) | [inline, virtual] |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 74 of file btDynamicsWorld.h.
| virtual void btDynamicsWorld::removeRigidBody | ( | btRigidBody * | body | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| virtual void btDynamicsWorld::removeVehicle | ( | btActionInterface * | vehicle | ) | [inline, virtual] |
obsolete, use removeAction instead
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 137 of file btDynamicsWorld.h.
| virtual void btDynamicsWorld::setConstraintSolver | ( | btConstraintSolver * | solver | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| virtual void btDynamicsWorld::setGravity | ( | const btVector3 & | gravity | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| void btDynamicsWorld::setInternalTickCallback | ( | btInternalTickCallback | cb, | |
| void * | worldUserInfo = 0, |
|||
| bool | isPreTick = false | |||
| ) | [inline] |
Set the callback for when an internal tick (simulation substep) happens, optional user info.
Definition at line 106 of file btDynamicsWorld.h.
| void btDynamicsWorld::setWorldUserInfo | ( | void * | worldUserInfo | ) | [inline] |
Definition at line 118 of file btDynamicsWorld.h.
| virtual int btDynamicsWorld::stepSimulation | ( | btScalar | timeStep, | |
| int | maxSubSteps = 1, |
|||
| btScalar | fixedTimeStep = btScalar(1.)/btScalar(60.) | |||
| ) | [pure virtual] |
stepSimulation proceeds the simulation over 'timeStep', units in preferably in seconds. By default, Bullet will subdivide the timestep in constant substeps of each 'fixedTimeStep'. in order to keep the simulation real-time, the maximum number of substeps can be clamped to 'maxSubSteps'. You can disable subdividing the timestep/substepping by passing maxSubSteps=0 as second argument to stepSimulation, but in that case you have to keep the timeStep constant.
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
| virtual void btDynamicsWorld::synchronizeMotionStates | ( | ) | [pure virtual] |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
Definition at line 44 of file btDynamicsWorld.h.
Definition at line 43 of file btDynamicsWorld.h.
btContactSolverInfo btDynamicsWorld::m_solverInfo [protected] |
Definition at line 47 of file btDynamicsWorld.h.
void* btDynamicsWorld::m_worldUserInfo [protected] |
Definition at line 45 of file btDynamicsWorld.h.

